PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: ephan@mit.edu  Get PDF
Get PDF
The Solar Blueboat

Figure 1.1: BlueBoat with 180W solar charging system.

The Solar BlueBoat project advances research in energy-aware autonomy for solar powered ASVs. Using the MOOS-IvP autonomy framework, the project develops behaviors to regulate vehicle speed and heading based on real time power usage, solar input, and mission objectives. Algorithms account for sun position, solar weather conditions and time of day, ensuring the ASV preserves sufficient energy for overnight survival while maximizing mission performance.
Alongside the autonomy development, the project implements a 180W solar charging system integrated with the onboard batteries. A power sensor connected to the BlueBoat navigator board allows for accurate power readings of solar input, enabling direct coupling between solar charging and autonomy behaviors.
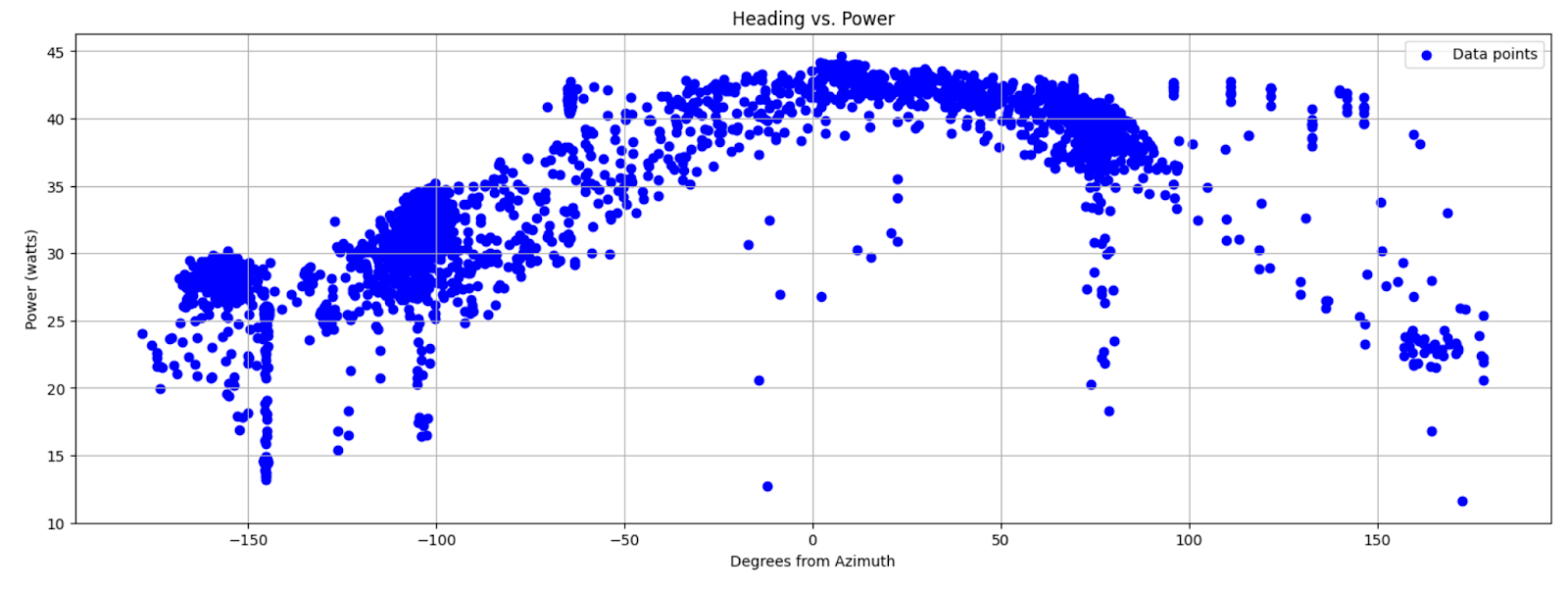
Figure 1.2: Relationship between ASV heading relative to solar azimuth and measured 50W solar panel power input, showing a cosine dependence.
| Status: | Ongoing since Spring 2025 |
| People: | Ethan Phan, Jeremy Wenger, Raymond Turrisi, Mike Benjamin (PI) |
| Sponsors: | MIT UROP Office |
| Software: | MOOS-IvP, https://moos-ivp.org |
| ArduRover, https://ardupilot.org | |
| BlueOS https://blueos.cloud | |
| Robots: | The Blueboat https://oceanai.mit.edu/pavlab/robots/blueboat |
Document Maintained by: ephan@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF