PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
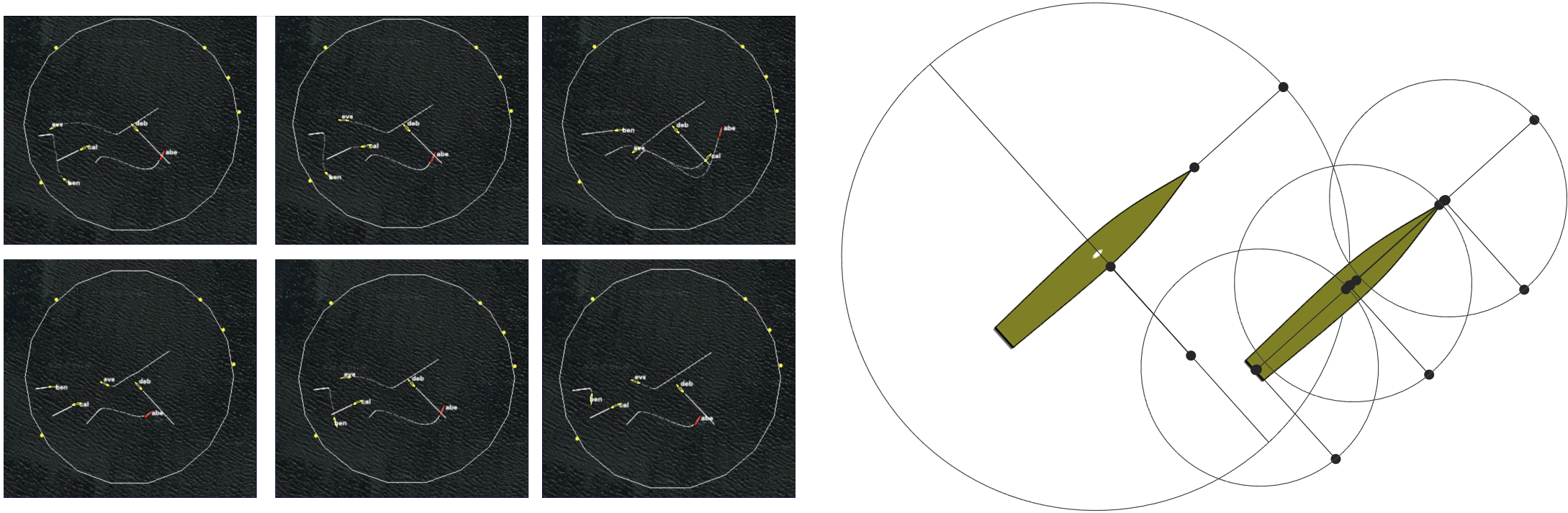
Advanced COLREGS
The core MOOS-IvP distribution includes several libraries supporting a Helm behavior for collision avoidance based on the Coast Guard Collision Regulations (COLREGS). This code was part of the 2017 release and field tested on several USV platforms in several countries. The 2019 release included slight improvements over the 2017 release. The Advanced COLREGS project further improves the robustness and efficiency of the existing publicly released COLREGS behavior, and to develop an automated testing environment for stress testing the behavior with multiple simultaneous contacts, static and moving obstacles, uncooperative contacts and other mitigating mission factors. It also augments to the underlying math libraries to consider varying turn characteristics and vessel shapes. The new behavior also allows for re-structuring of COLREGS rules to account for collaborating vessel teams that may, for example, always enable the Rule 14 Head-on rule, but may wish to suspend the Rule 17 Stand-on rule when travelling in a stable formation.

| Status: | Ongoing since August 2019 |
| People: | Mike Benjamin (PI) |
| Robots: | https://oceanai.mit.edu/pavlab/robots/herons |
| https://oceanai.mit.edu/pavlab/robots/philos | |
| Related Projects: | Sea Train, Swarm Autonomy Toolbox, MTASC, MOOS-IvP |
Related Publications
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF