PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
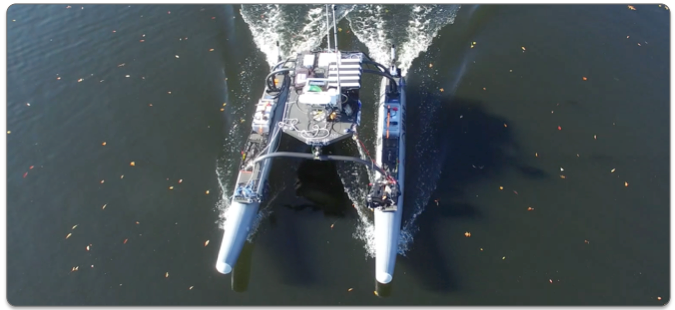
Remote Explorer IV
Funded by the AUV Laboratory at MIT Sea Grant (auvlab@mit.edu)
Access to the ocean depths has historically been limited due to technical and funding challenges. Consequently, there is limited public understanding of the subsea environment and even trivial investigations have been directed by commercial or high-profile interests. Repeatable, scientifically robust research has required expensive ship time while subjecting human operators to harsh environments and dull deployments. Recent improvements to technology and developments in autonomy software have made unmanned research platforms possible. Partially or fully autonomous, platforms such as the Wave Adaptive Modular Vessel (WAM-V) provide innovative solutions that reduce human exposure and monotony while increasing the duration and repeatability of data-gathering missions.
The Remote Explorer (REx) program is an ongoing series of vessels designed to link researchers and the public with ocean instrumentation. The most recent version is the REx IV, an unmanned surface vessel based on the 16-foot WAM-V and running the MOOS-IvP autonomy suite of software. The platform is modular, allowing a variety of sensors to be connected for gathering data from atmospheric and sea surface sensors. A marine winch allows subsea sensors or remotely-operated vehicles to be deployed to depth. Data and control of an ROV can be sent via live feed to researchers and classrooms.
To date, the REx IV vehicle has been used to conduct salinity studies at the outflow of the Neponset River in Massachusetts Bay and to assemble a bathymetric map of the Charles River Basin near Boston. Current projects include adapting the OpenROV to REx IVs winch deployment system and deploying the system as a platform for ocean acidification monitoring. The vehicle participated in the 2014 Maritime RobotX Challenge and will soon be outfitted for the 2018 RobotX competition.
Principal Investigator:
- Chryssostomos Chryssostomidis