PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
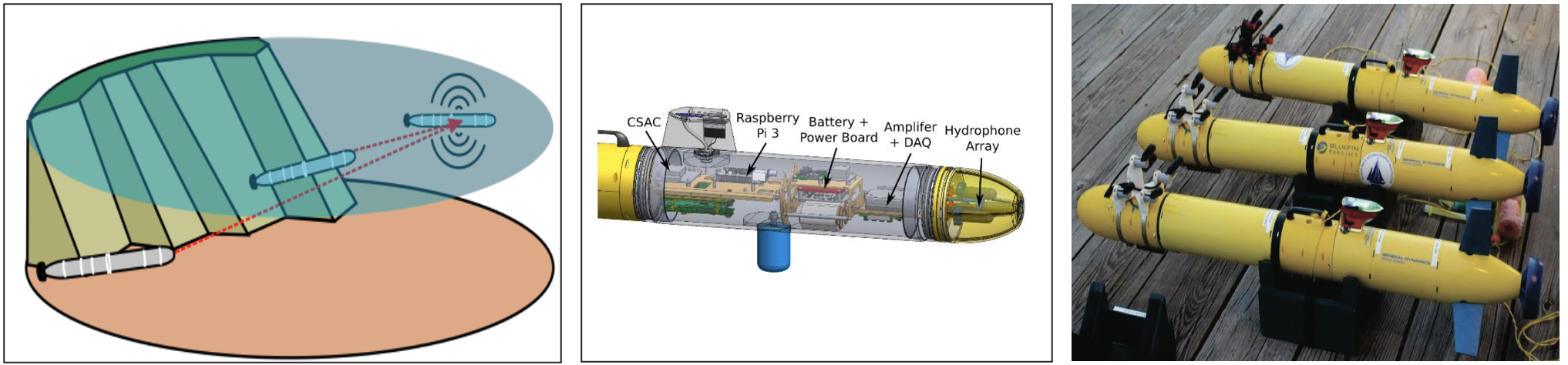
Perseus - A-Size UUV Swarming
The project addresses decentralized collaborative maritime autonomy, demonstrated through large-scale multi-vehicle distributed simulations and swarming operations using low-cost A-sized UUVs. The focus of the Perseus project is on the development of key enabling technologies required to realize Decentralized Collaborative Marine Autonomy using low-cost and expendable platforms. A key technology in this project is the one-way travel-time (OWTT) inverted ultra-short baseline (iUSBL) acoustic positioning system first demonstrated by MIT to enable multi-UUV relative navigation on a fleet of SandShark UUVs [Rypkema 2019, Fischell 2019]. The OWTT-iUSBL system consists of vehicle-mounted acoustic receiver arrays that are time-synchronized to a single acoustic beacon, allowing each UUV to calculate range and angle to the beacon and triangulate its relative position [Rypkema 2017]. This approach enables coordinated swarming behaviors such as maintaining formation [Rypkema 2019]. Although this system is significantly less expensive than a DVL-aided inertial navigation system typically used by UUVs, the prototype OWTT-iUSBL made use of a chip-scale atomic clock (CSAC) and off-the-shelf electronics resulting in increased cost; further development of the system in this project will take advantage of recently available electronics and crystal oscillator technologies to further lower system cost and size. Further refinement of system algorithms and autonomy will make it more robust for open-ocean use on A-size UUVs in Submarine Decoy missions, where multiple vehicles in formation will be used to emulate a larger target.

| Status: | Ongoing since March 2021 |
| Sponsors: | Lockheed Martin |
| People: | Nicholas Rypkema, Supun Randeni, Michael Triantafyllou (PI), Michael Benjamin (PI) |
| Software: | MOOS-IvP public codebase, Hydroman |
| Robots: | https://oceanai.mit.edu/pavlab/robots/morpheus |
Relevant Prior Publications
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF