PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
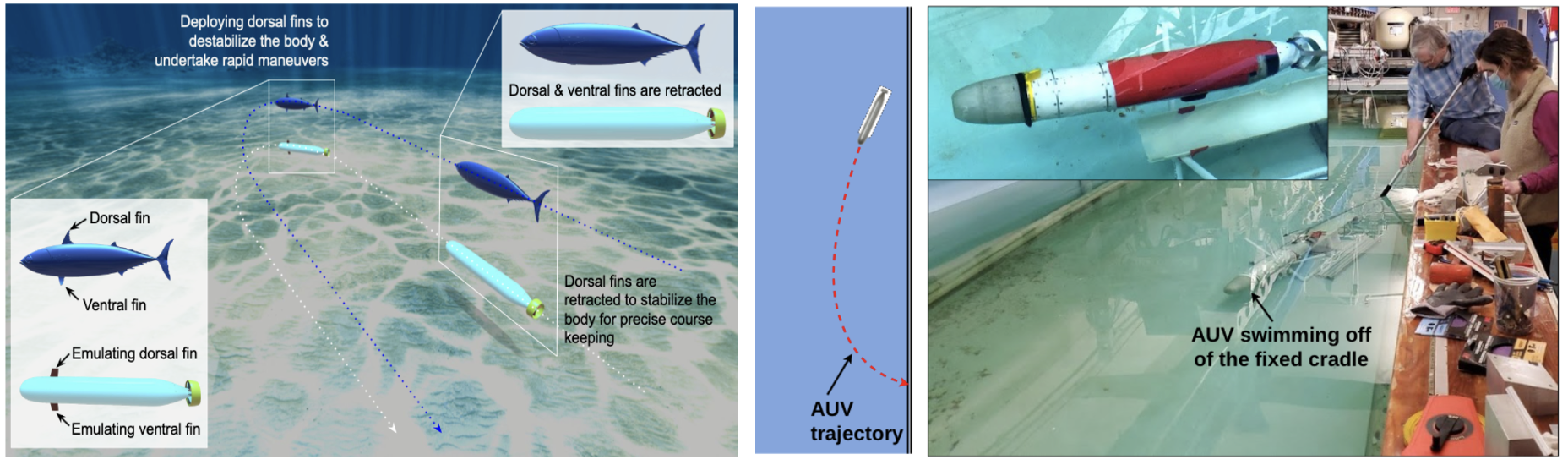
Morpheus - A Highly Maneuverable AUV with Bioinspired Dorsal Fins
By adopting bioinspired morphing dorsal and ventral fins, this project demonstrates how to achieve good directional stability, exceptional maneuverability, and minimal adverse response to turbulent flow, properties that are highly desirable for rigid hull AUVs, but are presently difficult to achieve because they impose contradictory requirements. This project develops the theory and design for switching between operating with sufficient stability that ensures a steady course in the presence of disturbances, with low corrective control action; reverting to high maneuverability to execute very rapid course and depth changes, improving turning rate by 25% up to 50%; and ensuring at all times that angular responses to external turbulence is minimized. Developments are demonstrated through tests on a 1-meter long autonomous underwater vehicle (AUV), named \textit{Morpheus}. The vehicle is capable of dynamically changing its stability-maneuverability qualities by using tuna-inspired morphing dorsal fins, which can be deployed, deflected and retracted, as needed. A series of free-swimming experiments and maneuvering simulations, combined with mathematical analysis, led to the design of optimal retractable dorsal fins.

| Status: | Active roughly 2019 - 2021 |
| Sponsors: | Lockheed Martin |
| People: | Supun Randeni, Michael Sacarny, Michael Triantafyllou (PI), Michael Benjamin (PI), Emily Mellin, Skyler Cheung |
| Software: | MOOS-IvP public codebase, Hydroman |
| Robots: | https://oceanai.mit.edu/pavlab/robots/morpheus |
Recent Publications
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF