PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
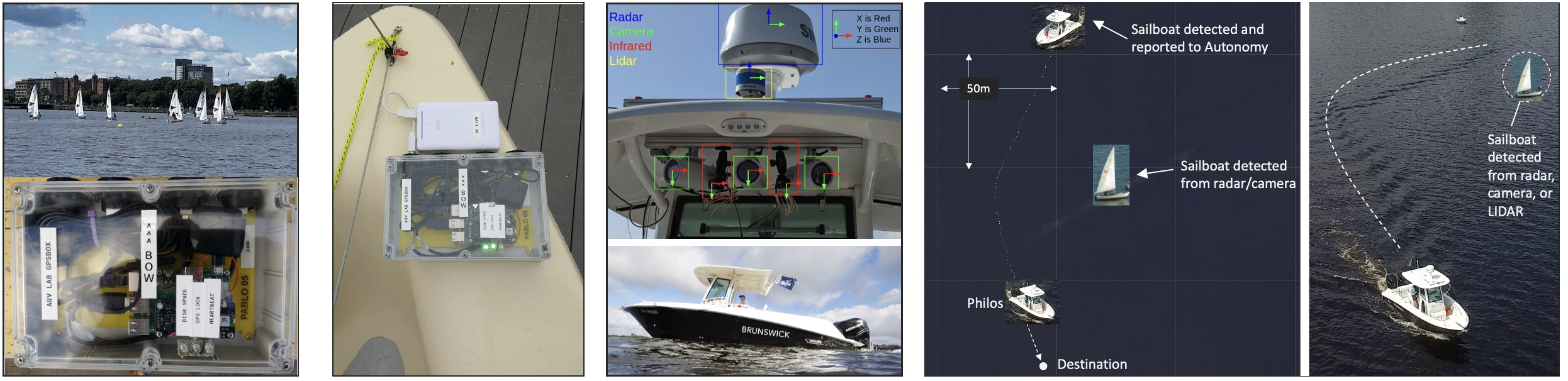
Prodromos - USV Collision Avoidance from ML-Based Perception
A core function Unmanned Surface Vehicle (USV) autonomy is the ability to safely avoid other vessels. The collision avoidance strategy is only as good as the information about the location and trajectories of nearby vessel traffic. The goal of Prodromos is to enhance USV collision avoidance capabilities by using Machine Learning (ML) generated perception capabilities derived from rich datasets collected on the Charles River at MIT. The project has three components:

- Datasets: The collection of rich datasets of sailboat traffic on the Charles River. During each dataset collection, a number of MIT sailboats will be fitted with a small computer box with GPS, logging ground-truth position, heading and speed of the sailboat. One box per sailboat, for all participating boats. The MIT autonomous Boston Whaler, Philos, will operate nearby collecting camera, LIDAR, and radar data of all sailboats within sensor range. Each dataset will be comprised of the time-synchronized data streams and logged data from each sailboat.
- Machine Learning: The datasets will be used to train a ML system with the goal of achieving a trained system capable of providing contact position, heading and speed from live sensor data in a deployed USV such as Philos.
- Autonomy: MIT collision avoidance behaviors will use the output of the ML-based perception system to generate autonomy decisions for safely avoiding contacts in the field.
The end demonstration goal of Prodromos is to deploy the MIT USV, Philos, to autonomously traverse from Boston to Cambridge through sailboat traffic in a consistently reliable and safe manner.
| Status: | Ongoing since May 2021 |
| Sponsors: | Brunswick (Philos USV) |
| People: | Mike Sacarny, Mike DeFilippo, Mike Benjamin, Maaya Prasad |
| Robots: | https://oceanai.mit.edu/pavlab/robots/philos |
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF