PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
Project Skywalker
The project involves the development and deployment of fixed-wing Unmanned Aerial Vehicles (UAVs), specifically the Skywalker X8, for rapid detection and management of wildfires. The goal is to adapt the MOOS-IvP middleware, originally designed for marine environments, to coordinate cooperative behaviors among UAVs during wildfire detection missions. The UAVs collaborate autonomously to optimize search areas and ensure effective detection of wildfires using onboard sensors developed by the Rainsdrops team, https://www.raindrops-wildfire.com

The project is ongoing since August 2024 and is conducted in collaboration with the NTNU UAV Lab. It is part of efforts to enhance autonomous UAV missions in emergency response scenarios, leveraging ArduPilot software and the MOOS-IvP codebase. Key tasks include developing communication systems, cooperative search algorithms, simulations, and conducting flight tests to validate the system's effectiveness.
The project aims to deliver scalable solutions for environmental monitoring and emergency response, offering a more lightweight and efficient alternative to resource-heavy frameworks like ROS. Additionally, it seeks to achieve a higher level of automation and coordination than current systems, such as the LSTS Toolchain
https://www.sciencedirect.com/science/article/pii/S1474667016305870,
enhancing the overall effectiveness of UAV operations in critical situations.

Figure 1.1: Field trials with the Skywalker X8, October 2024, Norway
| Status: | Ongoing since August 2024 |
| People: | Steve Nomeny, Tor Arne Johansen (PI), Mike Benjamin (PI) |
| Sponsors: | NTNU UAV Lab, Raindrops |
| Software: | MOOS-IvP, https://moos-ivp.org |
| ArduPilot, https://ardupilot.org/dev | |
| pArduBridge, (Steve Nomeny) | |
| Robots: | Skywalker X8 |
| https://www.uavmodel.com/products/skywalker-x8-2122mm-uav-fixed-wing | |
| Status: | Ongoing since Sep 2022 |
| Other Hardware: | Cube Orange Autopilot |
| https://ardupilot.org/plane/docs/common-thecubeorange-overview.html | |
| ODROID Payload Computer | |
| https://wiki.odroid.com/odroid-xu4/odroid-xu4 | |
| Related Project: | MOOS-IvP Swarm Toolbox |
In this project, a new MOOSApp has been developed, pArduBridge, responsible for establishing communication with ArduPilot. The application utilizes a forked and modified version of MAVSDK, which implements MAVLink communication protocols, and connects to ArduPilot running the ArduPlane software. This setup enables pArduBridge to access and read the UAV’s state, position, velocity, and parameter status, which can then be processed, modified, or published to the MOOS Database (MOOSDB). This design effectively creates an abstraction layer between the ArduPilot and the MOOS community. Since ArduPlane is a specific variant of the ArduPilot firmware, pArduBridge, with minor modifications, could also be adapted to operate with other ArduPilot variants, such as Copter, Rover, and Submarine.
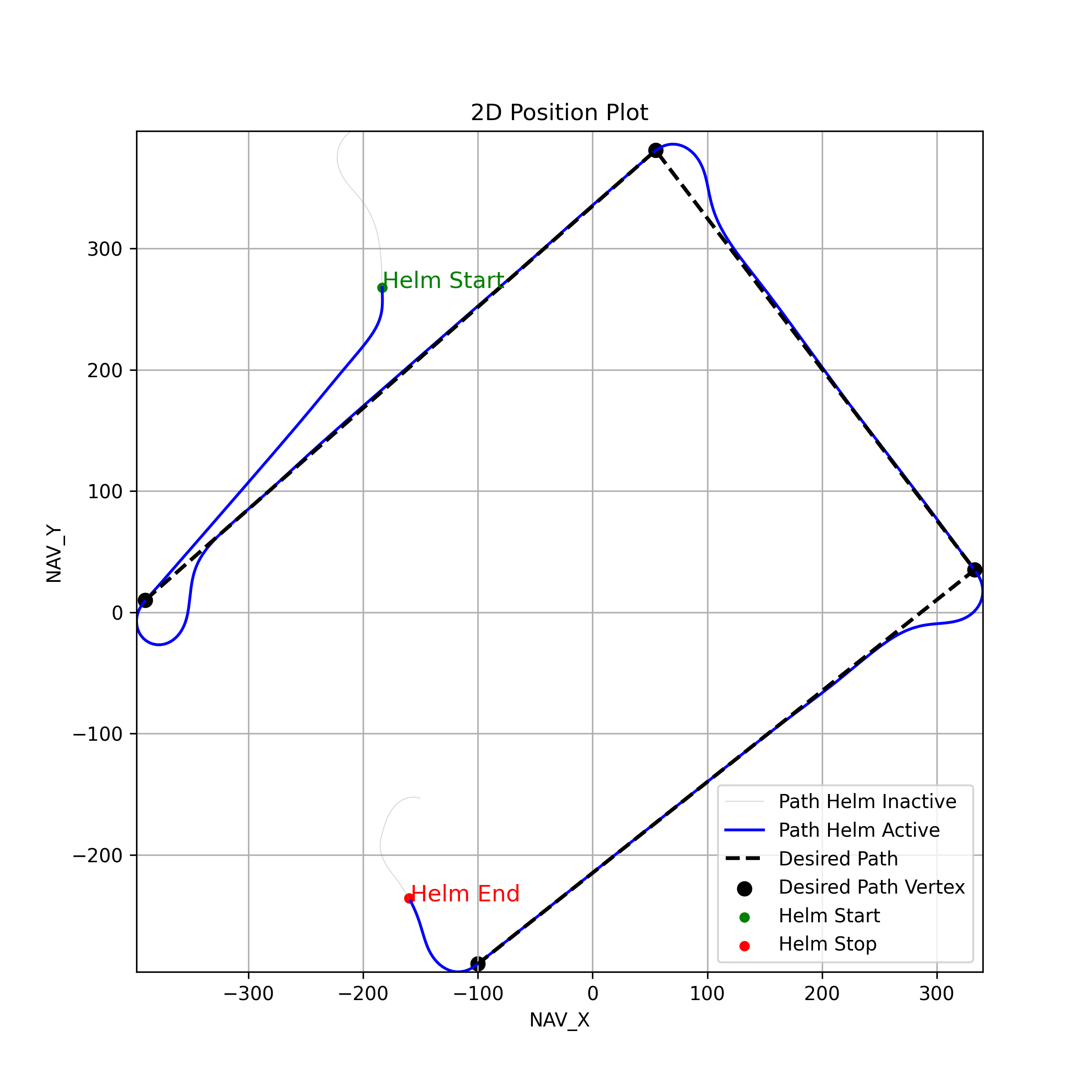
Figure 1.2: Telemetry Data from Field trials with the Skywalker X8, October 2024, Norway
Related Work
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF