PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
HydroMAN -- An environmentally adaptive, self-learning underwater navigation engine
The HydroMAN (stands for hydrodynamic model-aided navigation) is a state-of-the-art navigation fusion engine, equipped with an embedded self-learning vehicle flight dynamic model. The HydroMAN engine synthesizes measurements from sensors such as IMU, DVL, CVL, Speed Log, LBL/USBL, terrain-aided navigation and GPS into its self-calibrating vehicle model to compute the navigation solution, with the use of an array of sensor pre-processors and a layered extended Kalman filter based fusion algorithm. When accurate sensor measurements are available; for example, DVL bottom-lock or acoustic position updates, the HydroMAN self-calibrates the vehicle model to the local operating environment, largely compensating for the navigation drift provided by underwater currents and the model's own error estimate. The calibrated vehicle model is then utilized for navigation aiding when accurate sensors are unavailable, or turned off in order to save power. This concept makes HydroMAN considerably more superior to commercial INSs since accurate sensor measurements are not only used to improve the current navigation, but also used to improve future navigation when sensors are unavailable or turned-off. For low-cost vehicles, the fusion engine mostly relies on the IMU and the velocity estimates from the pre-estimated vehicle flight dynamic model, and provides a reasonable navigation solution.

| Status: | Ongoing since July 2018 |
| Sponsors: | DARPA, ONR |
| Prior Sponsors: | Battelle, Lockheed Martin, ONR |
| People: | Supun Randeni (PI) and Henrik Schmidt |
| Vehicles: | Bluefin 21 UUV, Bluefin Sandshark UUVs, MIT MK-39 EMATT UUV, Morpheus UUV, Silvertail UUV, Clearpath Heron USVs, C-Ray UUV, etc. |
HydroMAN 1.0 [top]
HydroMAN was originally developed to demonstrate the ability to accurately navigate underwater vehicles under ice in the Arctic. This was demonstrated at the US navy ICEX20: (https://www.youtube.com/watch?v=80ZNm0vOqJU&t=83s) conducted in the Arctic Beaufort Sea, where the MIT team deployed the Macrura AUV, a custom Bluefin 21 vehicle - Macrura was the first Bluefin 21 vehicle, originally referred to as the Bluefin Odyssey III, Caribou. The original purpose of HydroMAN was to accurately navigate Macrura underneath drifting Arctic sea ice in the upper and mid-water columns without DVL bottom-lock, and with the ability to withstand DVL ice-lock dropouts, acoustic communication/navigation-aiding dropouts and delays and time-lags in acoustic navigation-aiding.
The HydroMAN synthesized measurements from an IMU, upward-looking DVL, pressure sensor, self-calibrating vehicle flight dynamic model, and acoustic navigation updates from our custom integrated communication and navigation network, ICNN. Anticipating wind and current driven ice movement, the ICNN regularly updated the AUV with ice drift position and velocity measurements; HydroMAN corrected the DVL measurements accordingly. The vehicle flight dynamic model synthesized the corrected DVL ice-track measurements and ICNN navigation updates, when available, to self-calibrate the vehicle dynamic model to the local operating environment, largely compensating for the drift provided by underwater currents and the model's own error estimate. The calibrated vehicle model was then utilized for navigation aiding when DVL ice-lock was unavailable.
At ICEX20, HydroMAN-ICNN navigation framework demonstrated the capability of providing a non-diverging navigation solution with an uncertainty in the low tens of meters, which is similar to the GPS accuracy in high latitudes.
HydroMAN 2.0 [top]
The original HydroMAN system was embedded in the LAMSS software stack, which made it difficult to integrate into software systems of other vehicles. The HydroMAN 2.0 version is an independent navigation engine that communicates with client systems using a ``standard protocol" over TCP (i.e. exchanging data using a predefined google protocol buffer message definition with each message encoded using Base64 and transmitted over a TCP connection). The client system can send available navigation sensor data (e.g. DVL, IMU, GPS, CVL, LBL/USBL, terrain-aided navigation) and the HydroMAN, in return, will provide the fused navigation solution. Hence, the client could be running on any middleware like MOOS, ROS, Goby, DDS, LCM etc. but still will be able to use HydroMAN for navigation.
System Architecture & example integration with MITFrontseat [top]
Figure 1 shows the client-server system architecture of HydroMAN 2.0 using the dataflow diagram of MITFrontseat - an example vehicle software system. In this example, the MITFrontseat is responsible for the vehicle's navigation sensors drivers, vehicle autonomy, low-level control system, vehicle's actuator drivers. HydroMAN is responsible for providing the navigation solution of the vehicle.
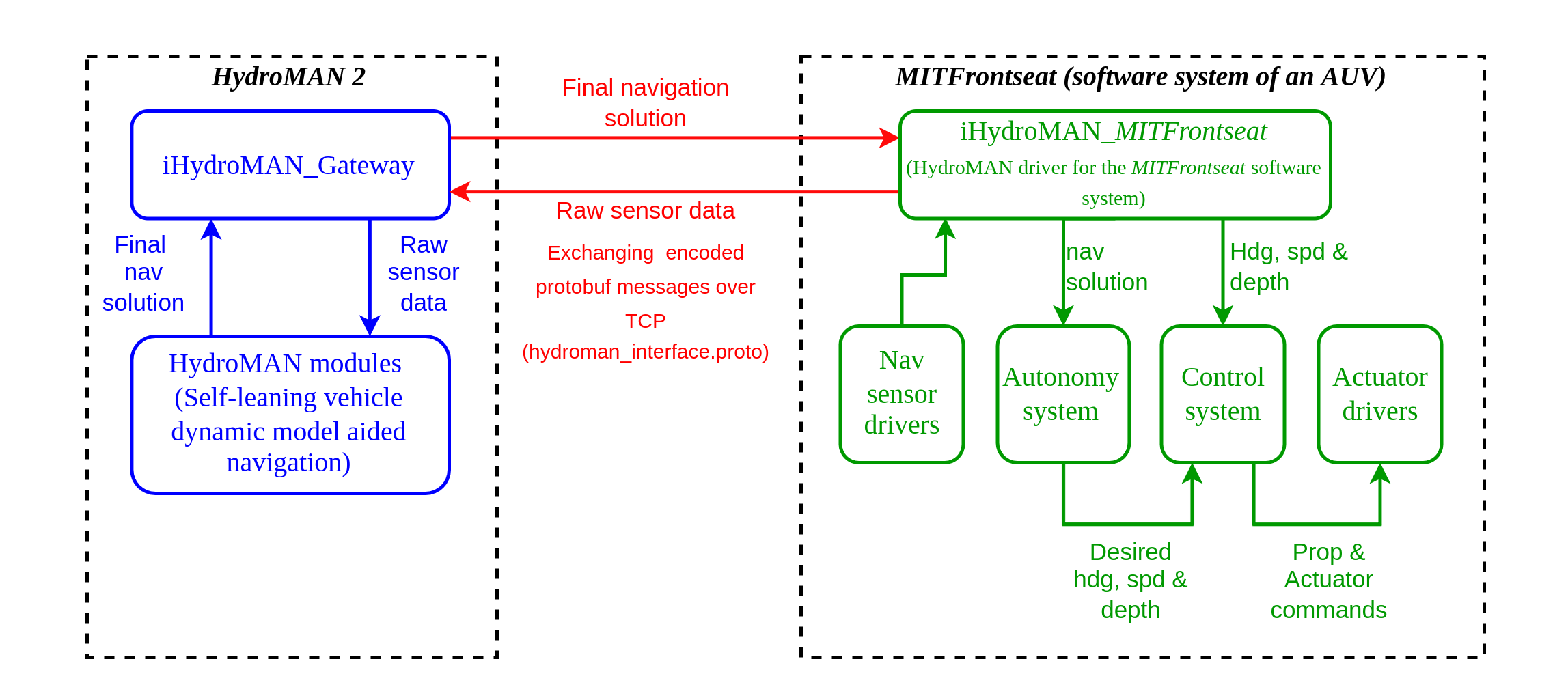
Figure 1.1: System architecture of HydroMAN 2.0 and an example integration with MITFrontseat
Accessing HydroMAN [top]
Currently the primary HydroMAN source code lives in an MIT github repository. A mirror image of this repository also exists in github.com for the purpose of providing access to external collaborators, and vehicle computers. Please contact Supun Randeni supun@mit.edu or the MIT Laboratory for Autonomous Marine Sensing Systems lamss@mit.edu to obtain access to these repositories.
HydroMAN 3.0 [top]
The HydroMAN 3.0 version will be released in January 2023. This version expands HydroMAN with capabilities including model-aided glider navigation, multi-mode vehicle (e.g. hybrid gliders) navigation, long-range navigation for transoceanic underwater vehicles, fusion of large number sensors with varying fidelities, and vehicle actuator fault tracking.
Recent Publications
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF