PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
R/V Philos - The Autonomous Boston Whaler, a.k.a., "RoboWhaler"
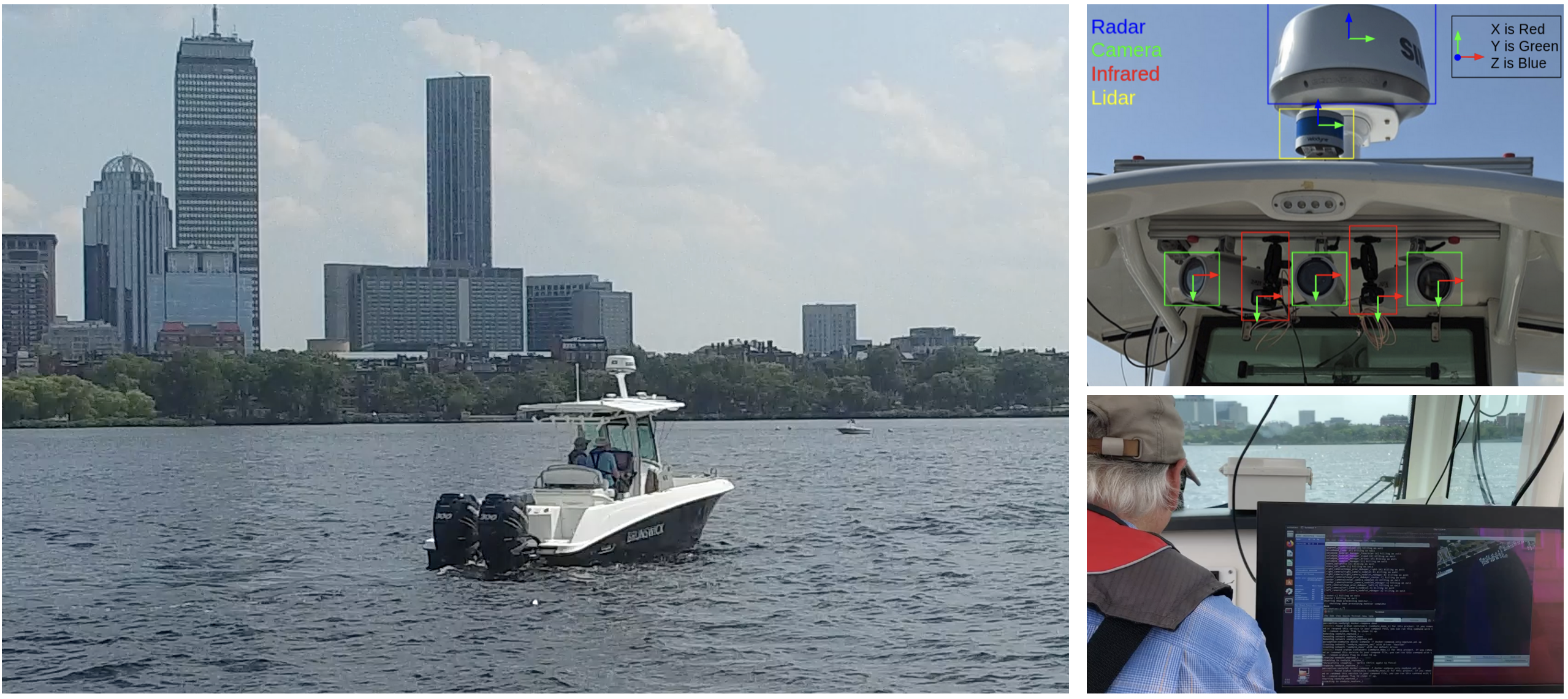

R/V Philos is a 7 meter Boston Whaler that has been outfitted with sensors, hardware, and electrical infrastructure to be used as a mobile marine autonomy laboratory. The vessel is primarily used in two modes, manned and unmanned. In the manned mode R/V Philos is used to collect coordinated marine perception datasets as well as marine support. In unmanned mode R/V Philos becomes 'RoboWhaler' and is used to test advanced marine perception and sensor fusion algorithms, as well as to test marine autonomy behaviors.
| Size: | 7 meters |
| Sensors: | GPS, IMU, 4G Broadband Radar, VLP-16 Velodyne 3D Lidar, 3 FLIR Blackfly 1.3 MP Cameras (center, left, right), 2 FLIR ADK 0.3 MP Infrared Cameras (left, right) |
| Supplemental Equipment: | 2 KW 120 VAC Inverter, 18 inch daylight display, distributed network access |
| Top Speed: | (under autonomy) 10 meters / sec |
| Propulsion: | Twin 250HP Mercury Marine Motors |
| Software: | Sensor System ROS, Autonomy System MOOS-IvP |
| Further Info: | https://oceanai.mit.edu/pavlab/docs/OCEANS21-2021157455.pdf |
| Datasets: | https://seagrant.mit.edu/auvlab-datasets-marine-perception-1 |
| Philos USV Photos: | https://oceanai.mit.edu/media/PhilosUSV/album |
| Current Projects: | https://oceanai.mit.edu/pavlab/proj/seebyte |
| Recent Events: | https://oceanai.mit.edu/media/Jul2721-MIT-NeptuneTests/album |
Recent Publications
Other Photos



Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF