PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
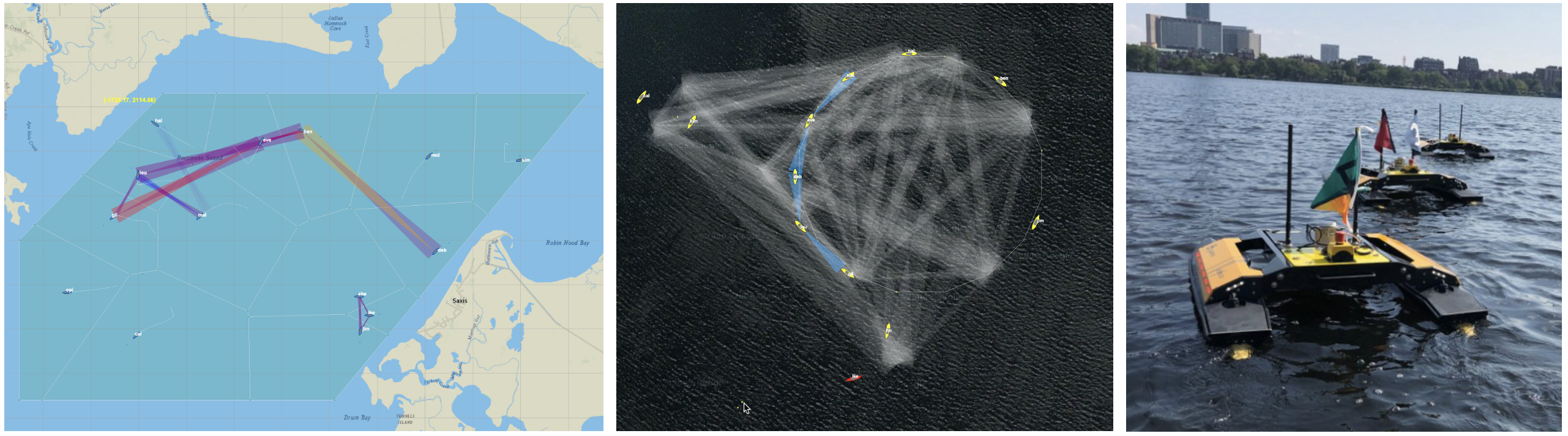
The MOOS-IvP Swarm Toolbox
The Swarm Toolbox is an extension of the MOOS-IvP public codebase containing a set of prototype libraries, MOOS applications and Helm behaviors with the focus on set of multi-vehicle, i.e., swarm, missions, and methods for decentralized task allocation. The toolbox also contains several logistic utilities for managing and operating large numbers of vehicles including (a) automated distributed software version control, (b) mission launch and health status monitoring, and (c) post-mission automated collection of mission log files and archiving. The primary mission focus areas are (1) large area distributed mobile sensing, (2) swarm defense of a high-value asset, and (3) multi-vehicle linear convoying. The toolbox also contains a prototype variant of the conventional MOOS-IvP simulator for enabling simulation up to 400x real-time per vehicle. This project has high overlap with the MTASC project which emphasizes the hardware aspect of swarm simulations.

| Status: | Ongoing since August 2019 |
| Sponsors: | MIT Lincoln Laboratory |
| Prior Sponsors: | NASA, DARPA, Lockheed Martin, Vecna Robotics |
| People: | Mike Benjamin (PI), Supun Randeni, Tyler Paine |
| Software: | MOOS-IvP public codebase, MOOS-IvP Swarm Toolbox |
| Robots: | https://oceanai.mit.edu/pavlab/robots/herons |
| Other Hardware: | https://oceanai.mit.edu/pavlab/proj/mtasc |
| Related Projects: | Manatee, MTASC, Sea Train |
Recent Publications
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF