PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
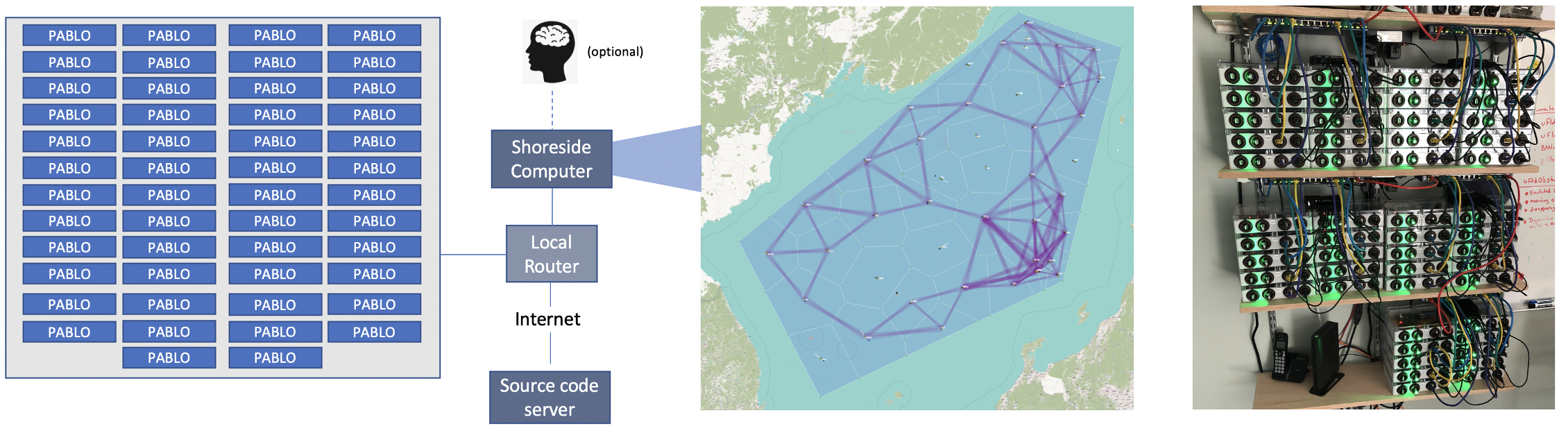
Multi-Agent Tactical Autonomy Simulation Cluster (MTASC)
MTASC is a collection of physically co-located computers residing on a single local area network for simulating large sets of autonomous agents or vehicles. The choice of these computers, in this configuration was chosen for two reasons. (1) These systems are very close to operation of actual marine robots in a distributed multi-vehicle mission. Each node in the MTASC cluster can be directly dropped into any one of the MIT small autonomous surface craft as its autonomy computer. Operation in simulation of the MTASC cluster on a local network requires nearly all the same networking, version control, monitoring, and command-and-control tools required for operating physically deployed robots on the water. The MTASC not only enables us to simulate very large missions much faster than real time, but it also prepares our lab and students with the skills for managing large numbers of physical robots in the field. (2) The second reason is security. Although a similar multi-vehicle simulation could be accomplished using containers and procuring network computing services, by using the MTASC, all software remains on the SD cards of each node. Proprietary or classified work may be easily managed in a version of the MTASC removed from the Internet.

| Status: | Ongoing since August 2019 |
| Sponsor(s): | MIT Lincoln Laboratory |
| People: | Mike Benjamin (PI), Tyler Paine |
| Software: | MOOS-IvP public codebase, MOOS-IvP Swarm Toolbox |
Recent Publications
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF