PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
ICEX 2016 and 2020
The Arctic Ocean is undergoing dramatic climatic changes, most significantly the extent of the ice cover, opening new shipping routes and providing access to a variety of natural resources. Environmental surveying will be essential to mapping these resources as well as establishing claiming rights. Currently, the ice-cover and otherwise harsh conditions of the arctic prevent traditional environmental surveying and under the ONR Ambient Noise MURI (Multidisciplinary University Research Initiative) MIT LAMSS is exploring new methods that exploit the unique characteristics of the ambient noise field for environmental characterization. As an experimental component for this research effort, MIT LAMSS responded to a community-wide invitation from the US Navy for proposals for a UUV component with an Arctic science objective to be incorporated in the ICEX16 exercise in the Beaufort Sea in March 2016. The proposed experiment involved the use of an MIT-owned Bluefin UUV Macrura with a towed hydrophone array for measuring the spatial and temporal variability of the ambient noise in the ice-covered Arctic with the purpose of assessing the climate induced changes in the acoustic environment and the implication for the development of new environmentally adaptive sonar technology for Arctic submarine operations. The principal objective of the experiment was to test and demonstrate a new UUV-based noise assessment approach and to determine the spatial and temporal statistics of the ice-generated noise, and to quantify the meaningful information that can be extracted for environmental assessment.
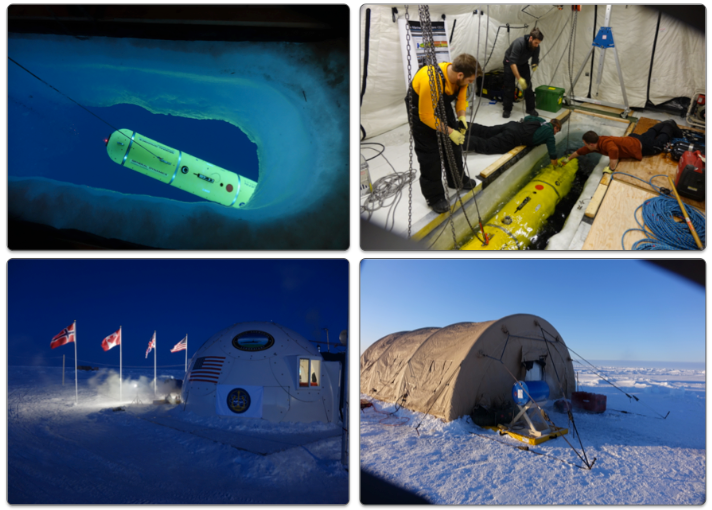
ICEX16: Ice camp and deployments of the MIT Bluefin-21 UUV.
Principal Investigators:
- Henrik Schmidt
Post-docs/Students:
- Dr. Erin Fischell
- Mr. Thom Howe
- LT Scott Carper
- Mr. Rui Chen
GobySoft Collaborators:
- Dr. Toby Schneider
Applied Physical Sciences (APS) Collaborators:
- Dr. Andrew Poulsen
Videos:
In addition to the scientific objectives, the MIT effort was aimed at gaining experience in deploying, operating and recovering a UUV with a 50 m long acoustic towed array from a 5x1m hole melted in the ice. A key component of this effort was the demonstration of an integrated acoustic communication and navigation concept using a Navy deployed undersea acoustic tracking and communication infrastructure. Thus, the UUV was equipped with a time synchronized acoustic source that allowed it to be tracked by the Navy tracking range, and the computed location of the UUV was subsequently transmitted via a Navy-deployed communication modem to the UUV, where it was fused into the INS navigation system. A similar closed-loop tracking/navigation concept has been used by MIT LAMSS in the past, e.g. in the DARPA DSOP-Shark program, but the climate-induced environmental changes provided a major operational challenge. Thus, a recently observed layer of warm pacific water entering through the Bering Strait creates a dramatic acoustic double-duct feature, which creates a severe shadow zone eliminating acoustic connectivity between 1 and 5 km range for the ICEX16 tracking and communication configuration. Based on this experience, MIT LAMSS is currently working on a novel environmentally adaptive communication approach, where the UUV will follow a depth envelope that optimizes the successful transmission and reception of communication and tracking signals. This is accomplished by incorporating a new behavior into the MOOS-IvP autonomy system, which continuously forecasts the acoustic connectivity, using on-board high-fidelity acoustic propagation models, and translates it into a desired depth which will be fused with other depth objectives by the multi-objective Helm. The figure below shows a simulated under-ice survey mission using this behavior. This behavior will be used and demonstrated in ICEX18.
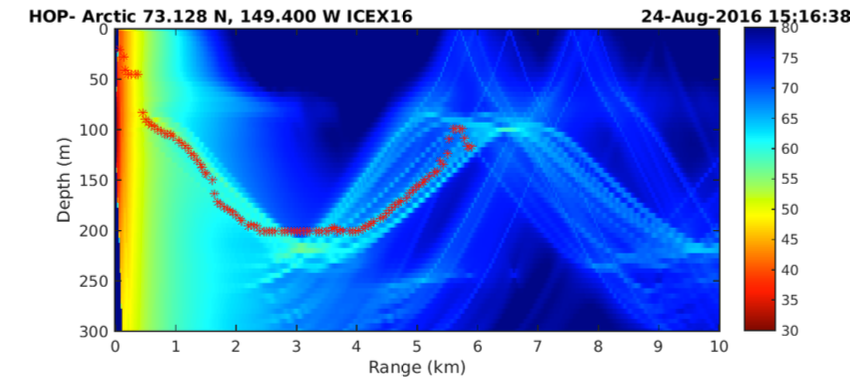
ICEX16:: Simulated under-ice UUV survey mission incorporating an autonomous depth adaptation behavior. The colors represent the acoustic transmission loss in dB, with red representing strong connectivity and blue weak connectivity. The red track shows the depth envelope of the simulated UUV mission. Note the maximum depth of 200 meters, enforced by the Helm.