PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: supun@mit.edu  Get PDF
Get PDF
Silvertail - A new class of multi-purpose & low-cost AUVs
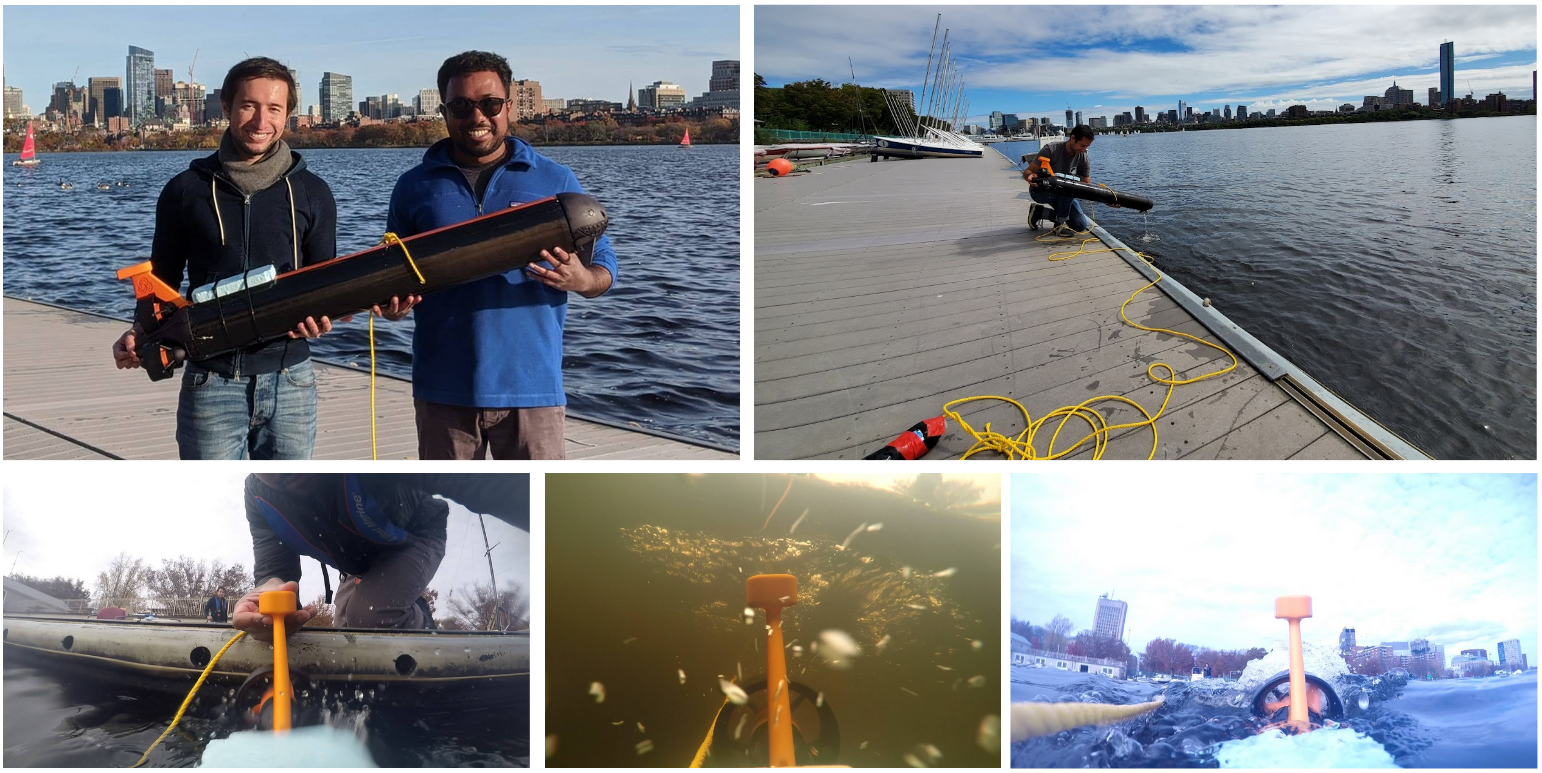

The underwater sensing capability can be significantly advanced by using multiple UUVs that work together in a collaborative autonomy paradigm, each serving as a node in a large sensory array. With this goal in mind, the Silvertail AUV was developed as a multi-purpose, reliable and yet extremely low-cost platform. This novel AUV class is powerful in software, and also very easy to manufacture.
AUV mode [top]
Silvertail is a unique AUV design that does not require control surfaces. This design is based on three thrusters located at the stern of the vehicle (tri-thruster configuration), which provide forward propulsion as well as heading, pitch and depth control. The vehicle is extendable with additional payload modules. Due to the simplicity of the design, it is extremely easy to manufacture in a short period of time (within 2-3 days) using simple tools and basic skills, without requiring specialized expertise or facilities.
Glider mode [top]
A standalone low-cost buoyancy engine is being developed to convert the vehicle to a hybrid glider. The buoyancy engine is integrated as a payload module, which can control buoyancy and vehicle pitch angle with commands provided by the main vehicle computer.
| Size: | 1.0 m length (extendable), 0.12 m diameter |
| Sensors: | GPS, IMU, external pressure/depth and temperature sensor, wifi, GSM, and tetrahedral hydrophone array with acoustic data acquisition system |
| Developers: | Nicholas Rypkema and Supun Randeni |
| Software: | Frontseat System: m\'{e}ta-silvertail |
| Autonomy System: MOOS-IvP | |
| Navigation System: HydroMAN | |
| Projects: | This is currently a non-funded hobby project |
Videos [top]
First in-water test: https://youtu.be/Q9XdPxz9AFQ
Second in-water test: https://youtu.be/7l5uMhcTgv4
Document Maintained by: supun@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF