PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
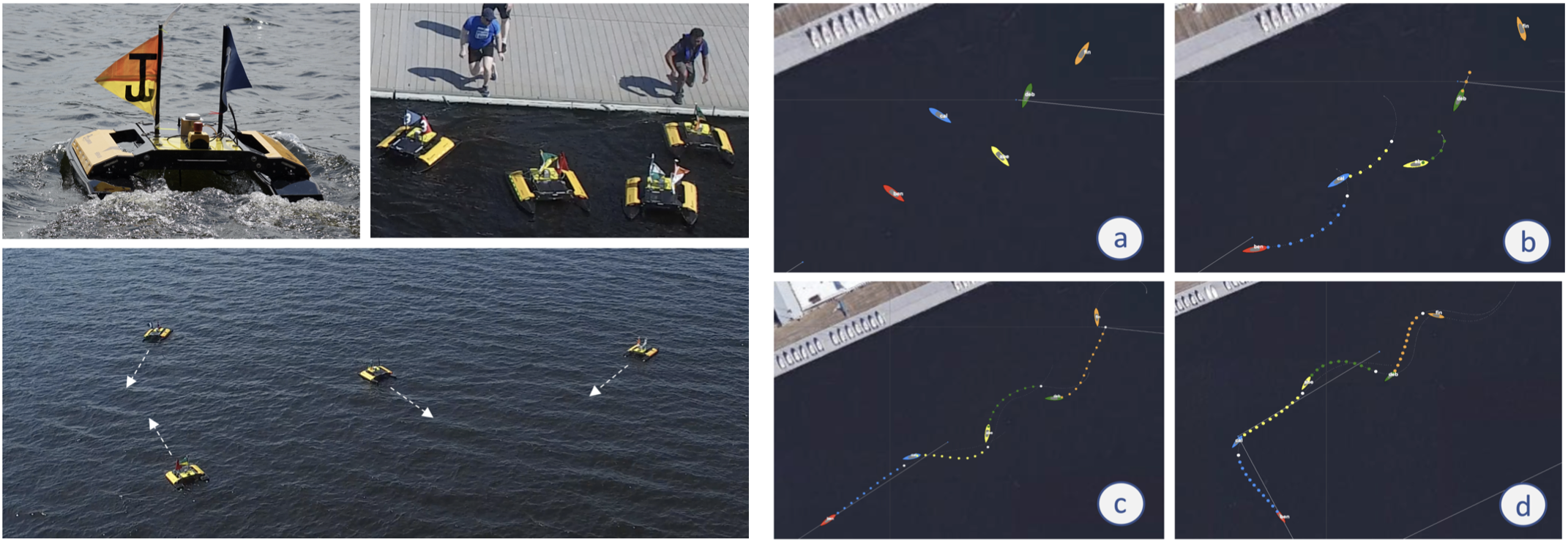
Sea Train
The Sea Train project at MIT involves field test evaluation of dynamic linear convoy algorithms for enabling multiple surface craft to form a train of vehicles, each following one another. Experiments include launching of vehicles with arbitrary starting positions, decentralized inter-vehicle auctions to form convoy ordering. The MOOS-IvP autonomy codebase in conjuction with modules in the Swarm Autonomy Toolbox, allow the vehicles form and hold their convoy patterns. The convoy parameters such as separation distance and convoy speed can be set at either the mission planning stage or during field exercises via command and control messages.

| Status: | Active 2020-2021 |
| Sponsor(s): | DARPA TTO / General Dynamics Applied Physical Sciences |
| People: | Mike Benjamin (PI), Supun Randeni, Tyler Paine |
| Robots: | https://oceanai.mit.edu/herons |
| Software: | MOOS-IvP public codebase, Swarm Autonomy Toolbox |
| Event Photos: | https://oceanai.mit.edu/media/PavLabSep21/album |
| Event Photos: | https://oceanai.mit.edu/media/Oct1821-SeaTrainTests/album |
Recent Publications
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF