PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
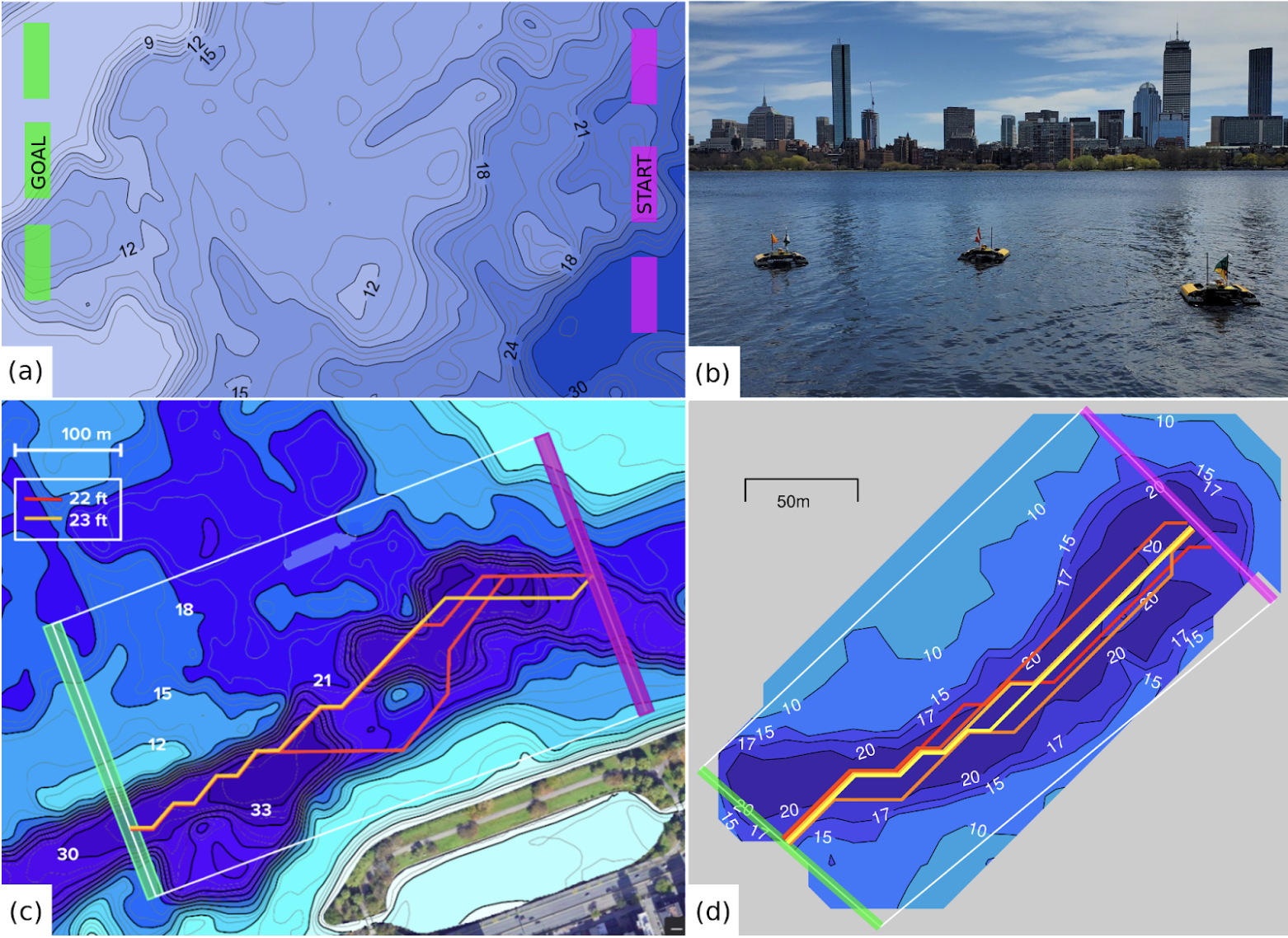
Proposal Based Adaptive Channel Search (PBACS)
This project addresses the problem of quickly finding a deep channel in a body of water using multiple unmanned vehicles. Our approach uses a gaussian process regression to build a non-parametric model of the bathymetry. These models are fused using a decentralized modified Kalman consensus algorithm which operates intermittently, and does not require a fully connected network graph to converge. Actions for each vehicle in the group are allocated using a new proposal and auction algorithm PBACS, which directs the search along paths that may still be viable. All of these techniques are completely decentralized, and the inherent robustness is critical as we find communication dropouts can happen often in the field.

| Status: | Ongoing since Summer 2021 |
| Sponsor(s): | United States Military Academy at West Point and the Office of the Undersecretary of Defense for Research and Engineering (ACC-APG-RTP W911NF2120206) |
| People: | Tyler Paine, Nick Gershfeld, Mike Benjamin (PI) |
| Robots: | https://oceanai.mit.edu/pavlab/herons |
| Software: | MOOS-IvP public codebase, MOOS-IvP-Pavlab codebase |
| Photos: | https://oceanai.mit.edu/media/WestPoint2022/album |
Recent Publications
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF