PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
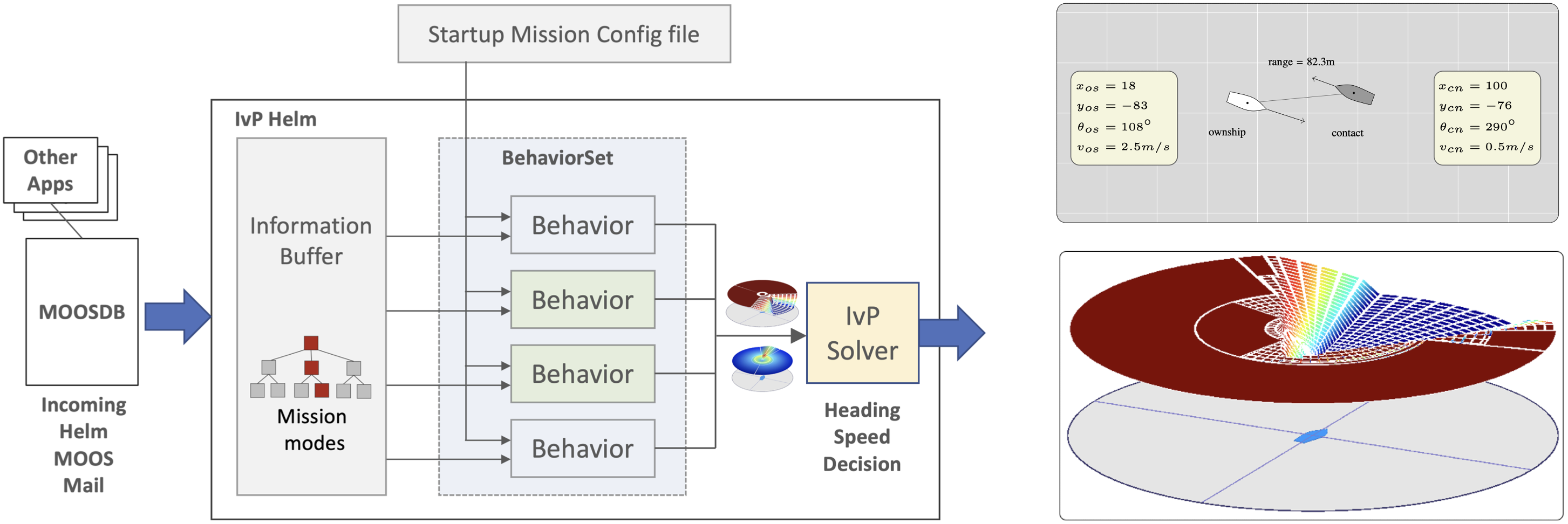
MOOS-IvP Open Source Marine Autonomy Project
In 2006 MIT launched the open source marine autonomy project, www.moos-ivp.org, dedicated to providing autonomy software, documentation and training to the marine robotics community. This work began in 2000 in the MIT Sea Grant AUV lab, and Department of Ocean Engineering, and continues currently in the Department of Mechanical Engineering. This work has been primarily funded by the Office of Naval Research since 2000. Over the last twenty years it has also matured through applied marine robotics efforts funded by DARPA, NOAA, NSF, NASA and several industry partners including Battelle, Lockheed Martin, General Dynamics, Thales UK, and Brunswick Corp. In 2012, with a generous 5-year grant from Battelle, MIT developed a new graduate course in Marine Autonomy, MIT 2.680, committed to the intersection of autonomy, sensing and communications challenges in marine vehicle applications of ocean environmental and DoD sensing.
The MOOS-IvP open-source C++ modules represent over 35 work-years of development that have been fielded on dozens of platform types around the world since its initial release in 2006. There are three themes are key to the architecture: platform independence, module independence, and nested capabilities. See www.moos-ivp.org.

| Status: | Ongoing since roughly 2000 |
| Sponsors: | Office of Naval Research, Code 311, Dr. Behzad Kamgar-Parsi |
| Prior Sponsors: | ONR Code 32, Battelle |
| People: | Michael Benjamin (PI), Henrik Schmidt, Paul Newman (MOOS) |
| Software: | MOOS-IvP public codebase |
| Documentation: | https://oceanai.mit.edu/ivpman |
MIT Robots
Relevant Links
- The MOOS-IvP main software website
www.moos-ivp.org - The MOOS-IvP main documentation website
https://oceanai.mit.edu/ivpman
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF