PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
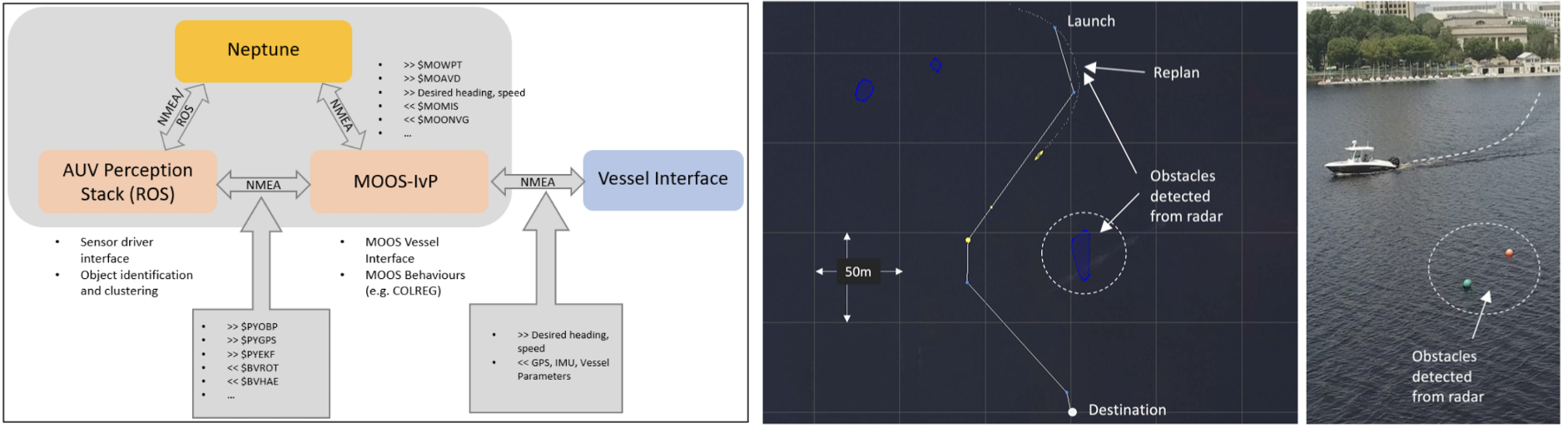
Multi-Architecture Autonomy (MOOS-IvP and Neptune)
Research in marine autonomy has traditionally involved development around a single autonomy architecture. Even when an architecture is open and modular, modules are typically all integrated into a single architecture. In this joint project Seebyte, an approach is considered that couples two distinct and mature architectures into a single combined autonomy system that leverages the strengths of both singular architectures to produce a more complete and capable system. In the first phase, the two autonomy architectures, SeeByte's Neptune, and MIT's MOOSIvP, are combined via a shared interface to leverage SeeByte’s mission path-planning and exclusion zone capabilities along with the reactive path execution with obstacle and collision avoidance behaviors of MOOS-IvP. Results from simulation were replicated with on-water tests held on the Charles River in Cambridge MA during July 2021. The Neptune/IvP combined system was deployed on MIT’s autonomous Boston Whaler and used to perform a safe crossing in a busy and dynamic environment.

| Status: | Ongoing since Sept 2019 |
| Sponsor(s): | ONR Code 32 / SeeByte, Ltd |
| People: | Mike Benjamin (PI), Mike DeFilippo, Conlan Cesar |
| Robots: | https://oceanai.mit.edu/pavlab/philos |
| Software: | MOOS-IvP public codebase, MOOS-IvP-Pavlab codebase |
| Photos: | https://oceanai.mit.edu/media/Jul2721-MIT-NeptuneTests/album |
Recent Publications
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF