PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
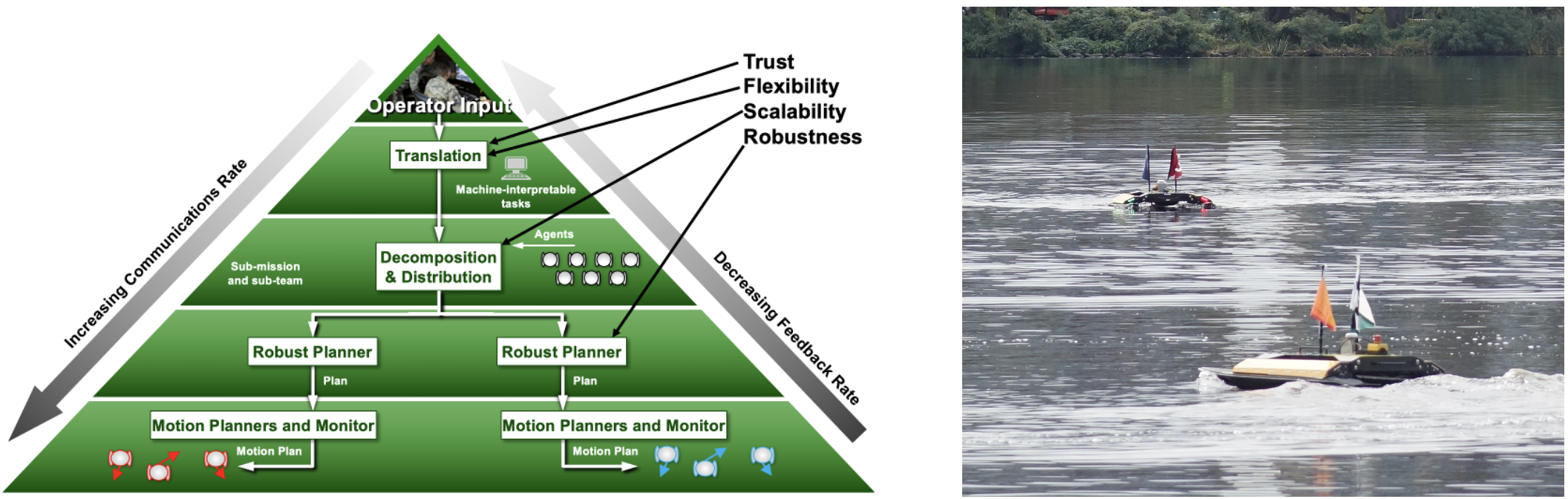
Inter- and Intra-Team Coordination from High-level Specifications (IITCHS)
IITCHS is a collaboration between MIT and MIT Lincoln Laboratory to develop and field test methods for planning and coordinating teams of autonomous systems based on spatial and temporal constraints and goals. The IITCHS framework was developed by Lincoln researchers and integrated into the MIT MOOS-IvP autonomy framework by MIT student(s). Field testing in the Fall of 2021 consisted of four Heron USVs in a coordinated mission on the Charles River. This will be extended to nine Heron USVs in 2022 with other platform types included in field exercises. The overall project goals are to (a) validate the IITCHS framework and algorithms on field-tested platforms, (b) provide existing MOOS-IvP autonomy users with a temporal planning tool with the integration layer implemented, and (c) provide existing or potential IITCH users with a platform autonomy system with a mature integration layer.

| Status: | Ongoing since July 2021 |
| Sponsor(s): | MIT Lincoln Laboratory |
| People: | Craig Evans, Mike Benjamin (PI), Tyler Paine, Supun Randeni |
| Robots: | https://oceanai.mit.edu/pavlab/herons |
| Software: | MOOS-IvP public codebase, MOOS-IvP-Pavlab codebase, IITCHS codebase |
| Photos: | https://oceanai.mit.edu/media/IITCHS-Tests/album |
Relevant Prior Publications
See also:
https://www.ll.mit.edu/r-d/projects/coordinating-teams-autonomous-systems
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF