PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
Marine Autonomy Lab - Open House, Wed September 7th, 2022
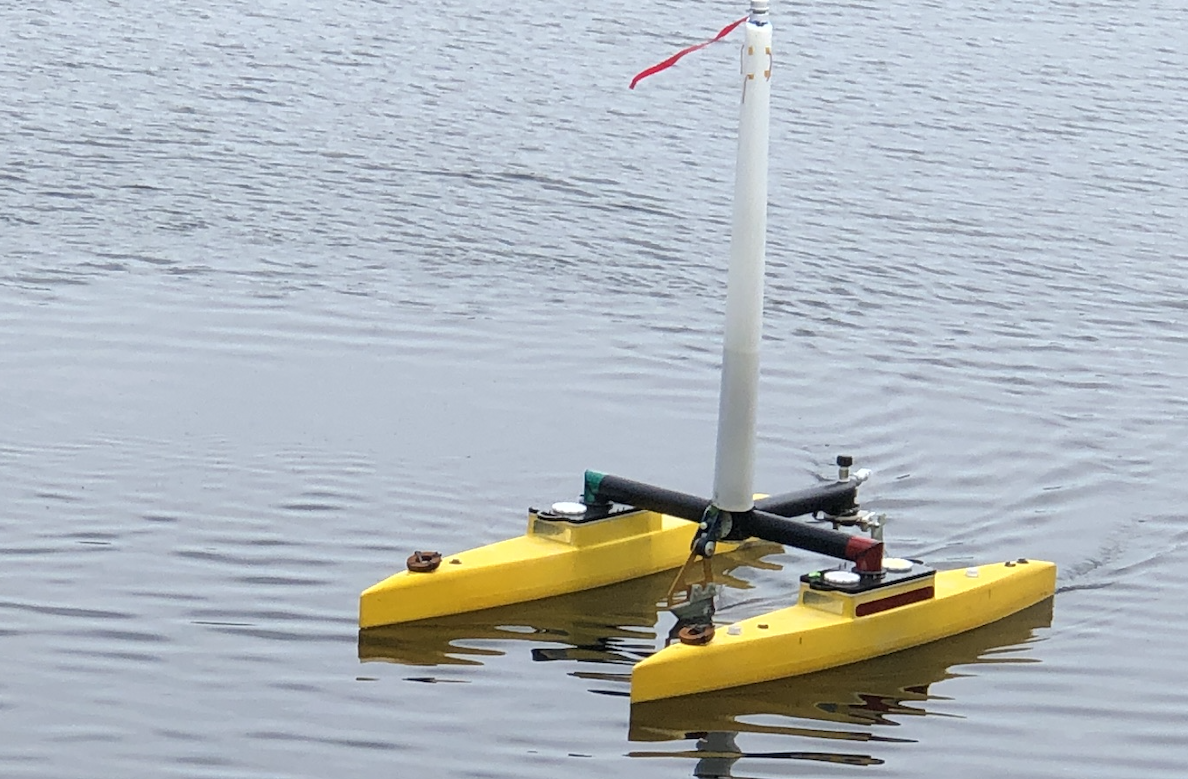
- What: A Lab Open House and Arrival of new Autonomous Sailboat
- When: Wednesday September 7th, 2022 from 500-630pm
- Where: The Marine Autonomy Lab at the MIT Sailing Pavilion
- Open To: MIT students interested in marine robotics and marine autonomy software. Novices welcome!!
- Food: Pizza while it lasts!
The Marine Autonomy Lab is situated at the MIT Sailing Pavilion and home to research on several autonomous marine vehicles, both underwater and surface vehicles. It is the teaching space for MIT 2.680, taught each Spring term, and is open 9 months of the year for daily in-water deployments of robotic platforms, by students from the Dept of Mechanical Engineering, MIT Sea Grant, and other groups at MIT.



THREE Fall 2022 UROPS Positions We Need To Fill!
(1) Working Towards Autonomous Sailing Behavior
Project Overview: This is an ongoing joint project between the MIT Marine Autonomy Lab, Sea Grant, and Marine Robotics LLC, which seeks to develop a low-cost / low-power sailing vehicle for coastal monitoring. We are currently working towards developing generalized autonomous sailing behavior within the MOOS-IvP Ecosystem. Undergraduate participants in this project will be directly supporting vehicle deployment and tests from the MIT Sailing Pavilion, in addition to contributing towards behavior development. Students may be asked to support other lab projects, and should have an interest in software development and robotics.
Student Objectives: By the end of this semester project, at minimum a student will have experience leading tests, analyzing and communicating data, and evaluating performance metrics of a system which are growth-oriented. Provided student interest, a student may also have experience developing MOOS nodes and contributing towards generalized sailing behavior.
This is a UROP position - you can very briefly fill out the application on this website, we will be in contact with you, and then work with you in completing the UROP application due Sept. 20th if we believe there is a match.
The application from our open house is viewable here with more information and pictures, and should be filled out in addition to the application here. https://forms.gle/vxCQhPdJz99AgrDL9

(2) Deployment of a Multi-Vehicle Algorithms
Project Overview: This project is core to one central mission of the lab, which is to develop and test multi-vehicle autonomy on marine robots. We use the fleet of Heron unmanned surface vehicle as test platforms, and we typically deploy them on the Charles River from the MIT Sailing Pavilion. We are always exploring new upgrades to these vehicles, which can require a mix of software and hardware. For example, currently we seek to develop and test new mechanical designs to rebalance the dynamics of the vehicles after recent upgrades.
This is a UROP position - you can very briefly fill out the application on this website, we will be in contact with you, and then work with you in completing the UROP application due Sept. 20th if we believe there is a match.
The application from our open house is viewable here with more information and pictures, and should be filled out in addition to the application here: https://forms.gle/vxCQhPdJz99AgrDL9
Minimum Requirements and Responsibilities:
- Work a minimum of 10 hours a week
- Can lift and carry 50 lbs
- Open to working a few hours on some weekends
Desired skills which best align with the interest of the corresponding courses of 2, 6 EE, 6 CS. Students in either course can participate in any part of the project which they are interested in contributing towards
- (6) Programming (Python, C++, etc..)
- (6) Linux / Ubuntu
- (6) Version control (git/svn)
- (6) Command line / bash
- (2) Familiar with Fusion 360 (or Solidworks)
- (2) Familiar with machine shop equipment and fabrication techniques
- (2) Familiar with 3D printing (FDM/SLA) and laser cutting
- (2) Awareness of MIT Makerspaces / is aware of MIT Mobius credential system

(3) Unmanned Underwater Vehicle (UUV) program
Program Overview:Unmanned underwater vehicles are generally extremely expensive; i.e. in the order of ~$50K - $8M. This is primarily due to the complexity of the problem - high attenuation rate of electromagnetic waves through the water (i.e. there is no GPS, wifi or radio communication underwater), extreme hydrostatic pressure (i.e. increment of ~1 atmosphere every 10 m), complex underwater acoustic environment, and high non-linearity of hydrodynamic forces. The UUV program at the MIT Sea Grant Autonomous Underwater Vehicles Laboratory (AUV Lab) aims to develop low-cost UUVs (i.e. in the order of ~$10K), and advanced vehicles with unique capabilities. The long-term goal of this program is to develop coordinated UUV swarms to establish enhanced underwater sensing capabilities.
Project Idea 1: Developing an extendable UUV payload section: We are currently developing a new low-cost UUV as an educational and multi-UUV research platform. This vehicle is based on 3D printed and commercial off-the-shelf (COTS) parts. The vehicles pressure hull currently consists of a single watertight enclosure. However, the UUV requires the ability to be extended with additional payload sections (i.e with extra watertight enclosures). In this project, you will design and construct a mechanical part that allows the users to extend the vehicle with additional watertight enclosures, which would likely include payload sensors.
Desired skills: Familiarity with CAD software (Fusion 360, Solidworks, etc.), familiarity with 3D printing
The C-Ray vehicle, which is capable of operating underwater as well as on ground (developed by https://www.pliantenergy.com/ in collaboration with MIT)
Project Idea 2: Detecting water-to-beach transition of C-Ray UUV A typical mission for the C-Ray UUV includes being launched from a boat, traveling underwater to the beach, and conducting a survey mission on the beach. A critical element of this operation is autonomously detecting whether the vehicle is in the water or on the ground, as it is transitioning from water to the beach. In this project, you will work with advisers from MIT as well as Pliant Energy Systems to design a simple, yet robust technology to detect this transition
This is a UROP position - you can very briefly fill out the application on this website, we will be in contact with you, and then work with you in completing the UROP application due Sept. 20th if we believe there is a match.
The application from our open house is viewable here with more information and pictures, and should be filled out in addition to the application here. https://forms.gle/vxCQhPdJz99AgrDL9