PavLab Photos/Events
- MechE News/March2025
- 2.680 Spring 2024
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Photo Archives
Current Lab Robots
Current Projects
- MOOS-IvP
- Swarm Toolbox
- HydroMAN
- MIT Sea Beaver UUV
- USV Model Estimation
- MOOS-IvP-Multi
- Blueboat Autonomy
- Spurdog UUV
- Skywalker
- DARPA LINC
- Stochastic Ray Trace
- MTASC
- Advanced COLREGS
Current UGrad Projects


Robot Archives
Project Archives
- Swarm Declustering
- PBACS
- Prodromos
- RoboWhaler
- Autonomous Fish Finding
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- HydroLink Buoy
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
The Boston Harbor Robo-Challenge
Lockheed Martin and Battelle Maritime Systems and Technologies
The goal of this project is to enable the fully autonomous transit of an unmanned surface vessel from the Charles River at MIT, through Boston Harbor and finally out into Mass Bay for a several day mission of ocean sampling. This includes a fully autonomous return. A high level map of the route is shown in Figure 1. A simulated motor boat transit is shown here: https://vimeo.com/182547565. This project involves the MIT SeaGrant WAM-V USV which is also the main platform for the MIT SeaGrant Reef Explorer Project.
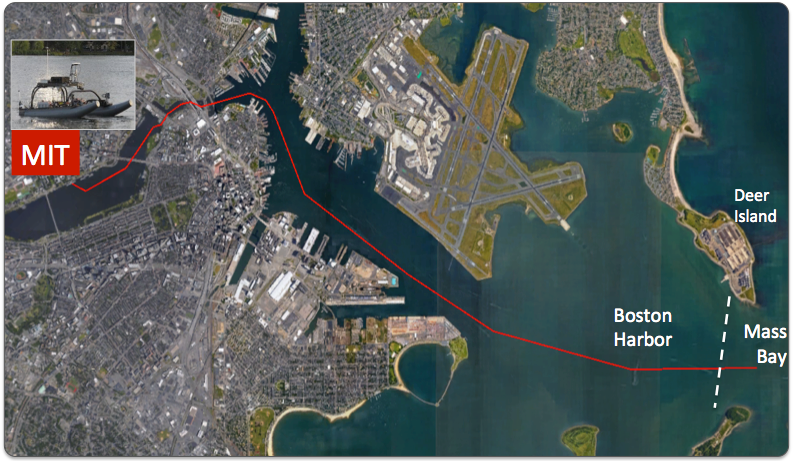
Figure 1: The robot path from the MIT Sailing Pavilion to Mass Bay through Boston Harbor.
Principal Investigators:
- Michael Benjamin
- Henrik Schmidt
MIT Sea Grant Collaborators:
- Mike Defilippo
- Mike Sacarny
- Paul Robinette
Students:
- Greg Nannig