MOOS-DAWG'26 Demo Day:
MIT Marine Autonomy Lab at the MIT Sailing Pavilion
8:00am-11:30am July 30th 2026 (second day of the workshop).
Lunch at 1130am (For workshop registrants).
The morning of Day 2 of the workshop we invite workshop attendees to the MIT Sailing Pavilion Marine Autonomy Lab, about a 5 mins from the Stata Center where the main workshop talks are held. The Demo Day is presented in the "workshop spirit", where work ranging from in-progress to more advanced is encouraged. Expect the unexpected.

The list of 2026 demo day participants will be posted no later than July 1st, 2026. The 2024 participants are listed below for reference.
Demo Day 2024 Participants
 www.jaia.tech Demo 01: The JaiaBot UUV | Jaia Robotics, JaiaBot UUV Jaia Robotics has been disrupting the autonomous underwater vehicle (AUV) market since 2020 by providing very low-cost, ultra-portable, high-speed aquatic drones that can be deployed in multi vehicle pods. Provided with open-sourced software, the JaiaBot system often serves as a platform for extending sensing and performance capabilities. The JaiaBot aquatic drones transit autonomously at high speed on the surface to their programmed data collection location, and provide multi-vehicle synoptic data collection throughout the water column. The ultra-portable JaiaBots can be launched from almost anywhere, including the surf zone, riverbank, dock, or watercraft. Powerful communications capabilities allow missions to be run and data collected from anywhere in the world. |
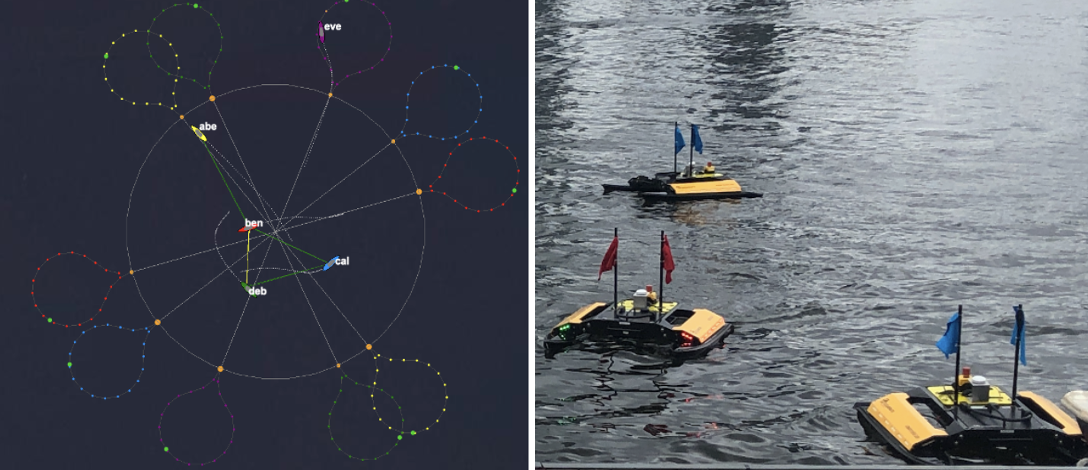
 Demo 02: Multi-agent decision-making with MOOS-IvP Demo 02: Multi-agent decision-making with MOOS-IvP | Multi-agent decision-making with MOOS-IvP: is an active area of research at the MIT Marine Autonomy Lab.Ā In this demo we will show a compilation of methods for group decision-making that include Voronoi-based area coverage, auctioning-based task allocation, and group option selection via consensus and dissensus.Ā The demonstration scenario is inspired by a high value unit (HVU) protection mission.Ā The high value asset will be the labÆs 16ft WAM-V by OPT and we expect to use 8-10 Heron USVs made by Clearpath Robotics as the protection agents.ĀAt least one intruder will be detected during the mission and the group decides who will intercept. |
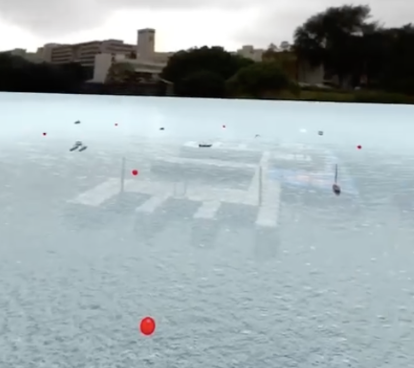 Demo 03: Human Robot Interface for MOOS-IvP Apps using Mixed Reality and LLMs Demo 03: Human Robot Interface for MOOS-IvP Apps using Mixed Reality and LLMs | NYCU, Taiwan Duckiepond 3.0 builds on our previous USV mission experiences to develop a cross-platform system that integrates a Unity frontend with a MOOS-IvP backend. This system connects maritime MOOS-IvP missions through immersive mixed reality interfaces, specifically using the Quest Pro headsetŚa consumer-grade device that ensures easy replication and setup. Advancements in large language models (LLMs) have enabled their incorporation into high-level task planning by human operators. We explored the impact of prompt engineering on MOOS behavior generation for the pHelmIvp Application. |
 Talk 04: The SeaBeaver II Autonomous Underwater Vehicle | MIT Sea Beaver II: The Sea Beaver II (SB2) Autonomous Underwater Vehicle was developed in the Spring of 2024 in the AUV Lab, part of the MIT Sea Grant College, by Supun Randeni and Michael Sacarny. Development was funded primarily by the MIT Dept of Mechanical Engineering to support the new undergrad course, 2.S01 Intro to Autonomous Underwater Vehicles, piloted in the Spring of 2024. Seven SB2 platforms were built for the class and three more AUVs are being built in the Summer of 2024. The platforms are a custom MIT AUV Lab design, constructed with commercially available parts and 3D printed materials on campus. The AUVs also contain two MIT custom printed circuited boards. Total equipment costs were less than $3000 per unit. |
 Talk 05: The Sea Scout Autonomous Underwater Vehicle | The MIT Sea Scout Autonomous Underwater Vehicle: The Sea Scout AUV was developed in 2023/24 at the MIT Department of Mechanical Engineering and the MIT Marine Autonomy Lab. The Objective of the Sea Scout is to develop a low-cost and open-sourced Autonomous Underwater Vehicle (AUV) which is available for graduate students and academic research. Develop a highly reliable platform which can be quickly adapted to a variety of applications, be simple to reproduce, with low-labor costs, and develop a broad community with wide-ranging and complementary interests. |
 Demo 06: The Jousting Mission for COLREGS Safety Evaluation | COLREGS based collision avoidance is a core capability for Unmanned Surface Vehicles (USVs) operating in the presence of other vessels. The mission demonstrated here, the "Jousting Mission" is a designed to be run on the water to maximize the COLREGS difficulty and variability with as little human setup and supervision time as possible, to maximize the safety/compliance testing in a given window of (typically expensive) test range time. The jousting mission, in short, proceeds with all vehicles starting on a circle, and then transiting to the opposite side. At the opposite side the vehicles perform a Williamson turn to ensure the vehicle returns to the circle with a heading pointed to the opposite side. |
 Demo 07: The Robonautics Autonomous Sailing Vessel | The Robonautics, LLC unmanned sailing vessel is designed to revolutionize marine observation and data capture. Capable of operating autonomously, this vessel provides persistent and real-time monitoring of coastal marine environments. Equipped with advanced sensors and data collection instruments, it can gather a wide array of oceanographic data, including water temperature, salinity, and wave height, as well as biological and atmospheric information. Its renewable energy system, utilizing solar power, ensures long-term operational capability without the need for refueling, making it an eco-friendly and cost-effective solution for extended marine missions. |
 Demo 08: Integration of MOOS-IvP and BlueOS | The Blue Robotics BlueBoat USV is a commercially available cost effective USV. Structurally, the vehicle consists of two rotomolded hulls secured by a foldable aluminum frame. Within each hull there is ample room for battery and payload storage as well as easy access to the electronics. Beginning in Summer æ24 members of the MIT Marine Autonomy Lab in conjunction with the MIT Lincoln Laboratory have worked to integrate MOOS-IvP with the BlueOS software stack via a publicly available BlueOS extension. They have also designed a payload interface kit that allows the easy deployment of a variety of sensors and packages. These efforts result in a widely accessible platform that can support robotics and marine research for the long term. |
 Demo 09: Sea Machines Robotics | Sea Machines Robotics is a Boston-based startup leading the charge in Autonomous Marine technology for boats and ships. Our suite of products can be installed onto an existing or newly built vessel to enhance control, safety and situational awareness. Our flagship product, SM300, uses an autonomy computer connected directly into engine and sensor systems using PLC technology to execute complex missions using the MOOS-IvP stack. Our UI can be connected to the vessel both wirelessly and remotely making it easy to operate the vessel from anywhere! Today we'll be demonstrating the SM300's capabilities including planning and remotely deploying a fully autonomous mission with our test vessel, SMR Maverick. MOOS-DAWG attendees will then get the chance to see the autonomous vessel up close! |
 Demo 10: PEARL | PEARL: is a novel low-cost solar-powered service platform for Autonomous Underwater Vehicles (AUVs). It runs the modular MOOS-IvP operating system and has the ability to dock with surfaced AUVs, monitor the environment, navigate to predetermined waypoints, provide collisionĀavoidance with other surface vessels and links the oceans with space through dual Iridium and Starlink satellite connectivity. Future autonomousĀmarine systems will not operate in isolation, one vehicle at a time, but as part of a heterogeneous System-of-Systems to improve our capabilities in environmental monitoring, scientific exploration, Blue economy related activities, as well as national defense. |