Prev-Talk | Next-Talk | All-Talks | Talks-Sorted | MOOS-DAWG'24
Talk-05: The Sea Scout Autonomous Underwater Vehicle (DemoDay 2024)
Raymond Turrisi, Haojing Huang, Filip Strřmstad, John Morrison, Alan Papalia, Kevin Becker, John Leonard, Michael Benjamin

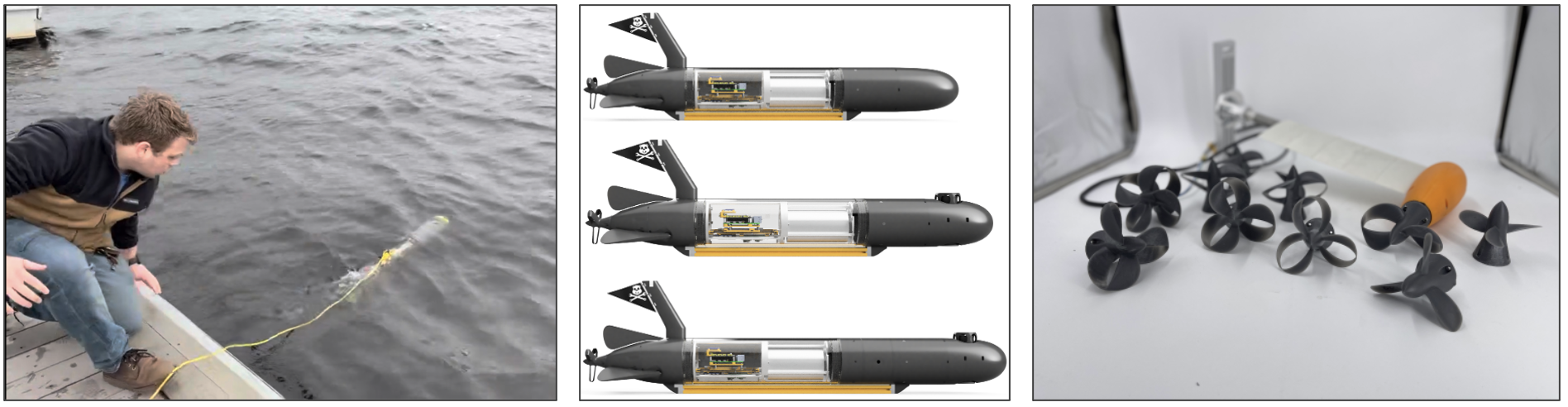
The Sea Scout AUV was developed in 2023/24 at the MIT Department of Mechanical Engineering and the MIT Marine Autonomy Lab. The Objective of the Sea Scout is to develop a low-cost and open-sourced Autonomous Underwater Vehicle (AUV) which is available for graduate students and academic research. Develop a highly reliable platform which can be quickly adapted to a variety of applications Be simple to reproduce, with low-labor costs, and develop a broad community with wide-ranging and complementary interests.
The methodology uses a common design which leverages commercially available parts, and design critical components which can support multiple modes of manufacturing, to adapt to costs and mission requirements, i.e. 3D printing, urethane casting, CNC machining. It is designed around sequential coupling, propagating Ethernet and I2C bus communication, in addition to switched power lines through a robust mechanical interface. It contains minimum necessary components in core design, ready to scale to meet wide ranging applications.
- Dimensions (min): 1 m x 11.5 cm
- Depth Rating: (min) 60 meters
- Endurance: (max - one battery): 30 hours
- Computer: Raspberry Pi 4/5 + Navigator Flight Controller
- Communication / Localization: Sea Trac USBL
- Sponsor(s): Saab Inc.
- People: Raymond Turrisi, Haojing Huang, Filip Strřmstad, John Morrison, Alan Papalia, Kevin Becker, John Leonard, Michael Benjamin
- Software: MOOS-IvP core, MOOS-IvP-SeaScout
- Costs: $2,400 core material costs $120 partially amortized costs
- Assembly technical competency: High school educated technician with moderate training (3D printing, some crimping, etc..)
- Observed Labor: 14 hours - trained technician
In-Development Payloads:
- WHOI MicroModem Payload - JP Morrison, Alan Papalia
- Low-cost custom towed array - JP Morrison, Paige Pfenninger, Alan Papalia
- Buoyancy Engine - Annica Lam, Ray Turrisi
- Payload Autonomy Cylinder - Kevin Becker
Categories:
- AUVs
- Sea Scout