Prev-Talk | Next-Talk | All-Talks | Talks-Sorted | MOOS-DAWG'24
Talk-04: The SeaBeaver II Autonomous Underwater Vehicle (DemoDay 2024)
Supun Randeni, Michael Sacarny, Michael Benjamin

The Sea Beaver II (SB2) Autonomous Underwater Vehicle was developed in the Spring of 2024 in the AUV Lab, part of the MIT Sea Grant College, by Supun Randeni and Michael Sacarny. The predecessor of the SB2, Sea Beaver I, was funded by the DARPA TTO office, in 2022. Development of the current version was funded primarily by the MIT Dept of Mechanical Engineering to support the new undergraduate course, 2.S01 Introduction to Autonomous Underwater Vehicles, taught initially in the Spring of 2024. Seven SB2 platforms were built for student use for the class and three more AUVs are being built in the Summer of 2024 to support an external DARPA TTO undersea networking research project. The platforms are a custom MIT AUV Lab design, constructed with commercially available parts and 3D printed materials on campus. The AUVs also contain two MIT custom printed circuited boards. Total equipment costs were less than $3000 per unit. The technical specification of the platform is as follows:
- Base vehicle length: 0.95 m (extendable)
- Pressure hull diameter: 0.1 m
- Battery capacity: 14.8 V, 18 Ah (extendable).
- Propulsion: Blue Robotics T200, passive gliding (optional)
- Actuation: Three servo-driven, independent control surfaces. Mast light strobes for status indication.
- Communication: Wifi, cellular (optional), Iridium (optional), hydronet acoustic modem (optional).
- Processing: BeagleBone PocketBeagle as a frontseat computer, Raspberry Pi 4 as a backseat computer, Jetson Nano as an alternative backseat computer (optional).
- Software: MITFrontseat with MOOS-IvP for autonomy, HydroMAN for navigation, VECTORS for simulation (with the option for LAMSS Virtual Ocean), Goby DCCL for communication (optional).
- Sensors: XSens MTi-3 attitude and heading reference system (AHRS), external depth sensor, GPS with external active antenna, internal barometric pressure sensor, Nortek Nucleus DVL (optional).
- Payload controller extensibility:' Base vehicle is equipped with a backseat computer (with payload SD card option). A TCP/IP based generalized payload control interface is available for additional backseat computers.
- Payload extensibility: Base vehicle can be extended with free-flood or pressure-tight sections for additional sensor and battery payloads.
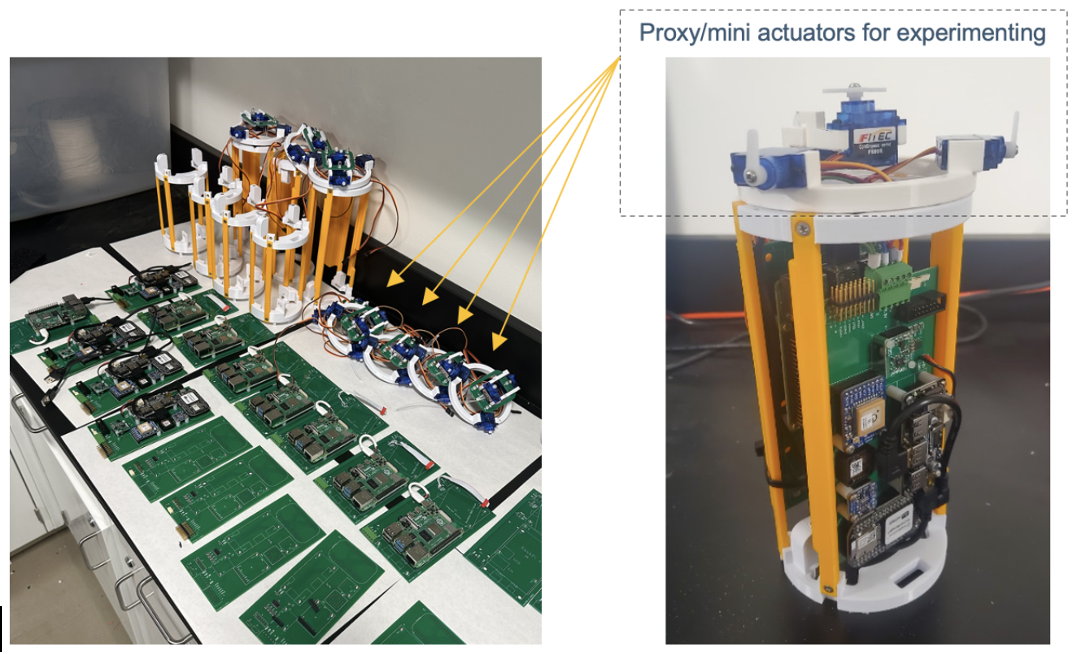
The design of the SB2 AUV allows for the primary electronics housing to be built separately and powered by a small portable battery. For the undergraduate class, this portion of the vehicle was replicated to 18 units, to allow each student to take possession for the duration of the class. This portion was dubbed the “training kit”. Once the phase of the class evolved to in-water experiments, the training kits were re-integrated into the AUV housing to prepare for in-water labs.
Categories:
- AUVs
- HydroMAN
- MITFrontSeat
- VECTORS
- Sea Beaver II (SB2)