
- pMarineViewer
- uHelmScope
- Geometry Utilities
- uTimerScript
- pContactMgrV20
- uProcessWatch
- uLoadWatch
- pNodeReporter
- uXMS
- uSimMarineV22
- pMissionHash
- pMissionEval
- pHostInfo
- uPokeDB
- uQueryDB
- uMayFinish
- pEchoVar
- pDeadManPost
- pObstacleMgr
- iSay
- pRealm
- pSearchGrid
- pSpoofNode
- uTermCommand
- uSimCurrent
- uFldNodeBroker
- uFldShoreBroker
- uFldNodeComms
- uFldMessageHandler
- uFldBeaconRangeSensor
- uFldContactRangeSensor
- uFldCollisionDetect
- uFldCollObDetect
- uFldObstacleSim
- uFldScope
- uFldPathCheck
2.680 Competition Apps

uSimCurrent: Simulating Drift Effects
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
1 Overview
2 Configuration Parameters for uSimCurrent
3 Publications and Subscriptions for uSimCurrent
3.1 MOOS Variables Published by uSimCurrent
3.2 MOOS Variables Subscribed for by uSimCurrent
1 Overview
The uSimCurrent MOOS application is a newcomer in the toolbox and documentation is thin. Nevertheless it has been tested and used quite a bit and is worth a quick introduction here for those with a need for some ability to simulate water current on unmanned vehicles.
uSimCurrent is intended to be used with the uSimMarine simulator, by generating drift vectors and publishing them to the MOOSDB. The uSimMarine simulator has a generic interface to accept externally published drift vectors regardless of the source, written to the variables DRIFT_X, DRIFT_Y, and DRIFT_VECTOR. The uSimCurrent application reads a provided current field file containing an association of water current to positions in the water. On iteration of uSimCurrent, the vehicle's current position is noted, looked up in the current-field data structure, and a new drift vector is posted. The idea is shown in Figure 1.1.
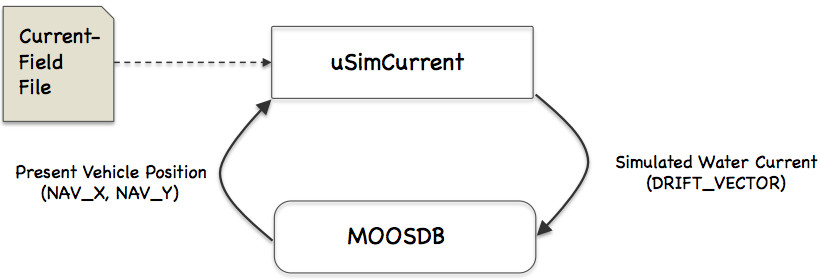
Figure 1.1: The uSimCurrent utility: The simulator is initialized with a data file describing currents and locations. The simulator then repeatedly publishes a current vector based on the present vehicle position.
2 Configuration Parameters for uSimCurrent
The following configuration parameters are defined for uSimCurrent. A more detailed description is provided in other parts of this section. Parameters having default values are indicated so.
Listing 2.1 - Configuration Parameters for uSimCurrent.
| current_field: | Name of a file describing a current field. |
| current_field_active: | Boolean indicating whether the simulator is active. |
3 Publications and Subscriptions for uSimCurrent
The interface for uSimCurrent, in terms of publications and subscriptions, is described below. This same information may also be obtained from the terminal with:
$ uSimCurrent --interface or -i
3.1 MOOS Variables Published by uSimCurrent [top]
The primary output of uSimCurrent to the MOOSDB is the drift vector to be consumed by the uSimMarine application.
- DRIFT_VECTOR: drift vector representing the prevailing current. See the uSimMarine documentation.
- USC_CFIELD_SUMMARY: Summary of configured current field.
- VIEW_VECTOR: Vector objects suitable for rendering in GUI applications.
3.2 MOOS Variables Subscribed for by uSimCurrent [top]
Variables subscribed for by uSimCurrent are summarized below.
- NAV_X: The ownship vehicle position on the x axis of local coordinates.
- NAV_Y: The ownship vehicle position on the y axis of local coordinates.
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF