
General Topics
Swarm Toolbox Apps
- pTaskManager
- pMediator
- pEncircle
- uFldVoronoi
- uFldConvoyEval (TBD)
- uFldTaskMonitor (TBD)
- pSpoofNode

MOOS-IvP-Swarm Missions
Swarm Toolbox Behaviors
Utilities
- alogmtask (TBD)
- The pickpos utility
Docker labs
The TaskMuster Behavior
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
src: project-pavlab/bhvdocs/bhv_task_wpt
1 The TaskMuster Behavior
1.1 Configuration Parameters
1.2 Publications
1.3 Flags and Macros
1 The TaskMuster Behavior
The TaskMuster behavior is a behavior for participating in a decentralized auction among a group of vehicles, to determine which vehicle is most appropriate to transit to a given muster region. In this simple behavior the auction bit is solely based on linear distance to the center of the muster region. Most of the functionality of this behavior is comprised of the IvPTaskBehavior superclass.
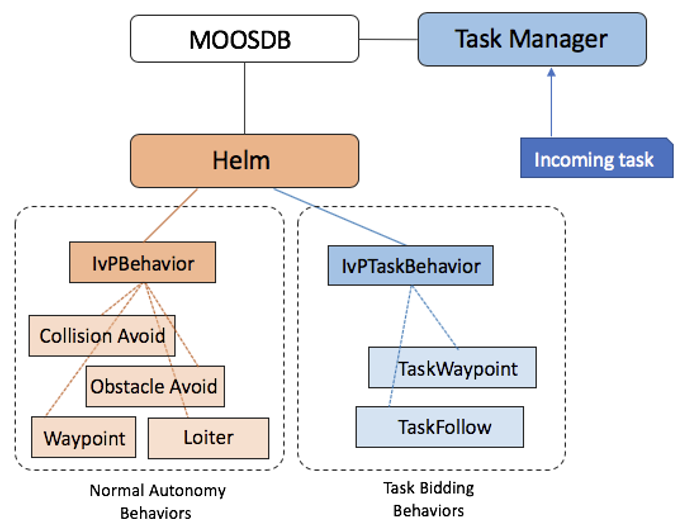
Figure 1.1: Task Behaviors: A task behavior are behaviors of the helm just like any other behavior. They all have the IvPTaskBehavior superclass to support the common components needed to participate in inter-vehicle auctions.
The primary function of a task behavior, like the TaskMuster behavior, is to participate in an inter-vehicle auction. The high-level view of an auction is shown in Figure ??? below.
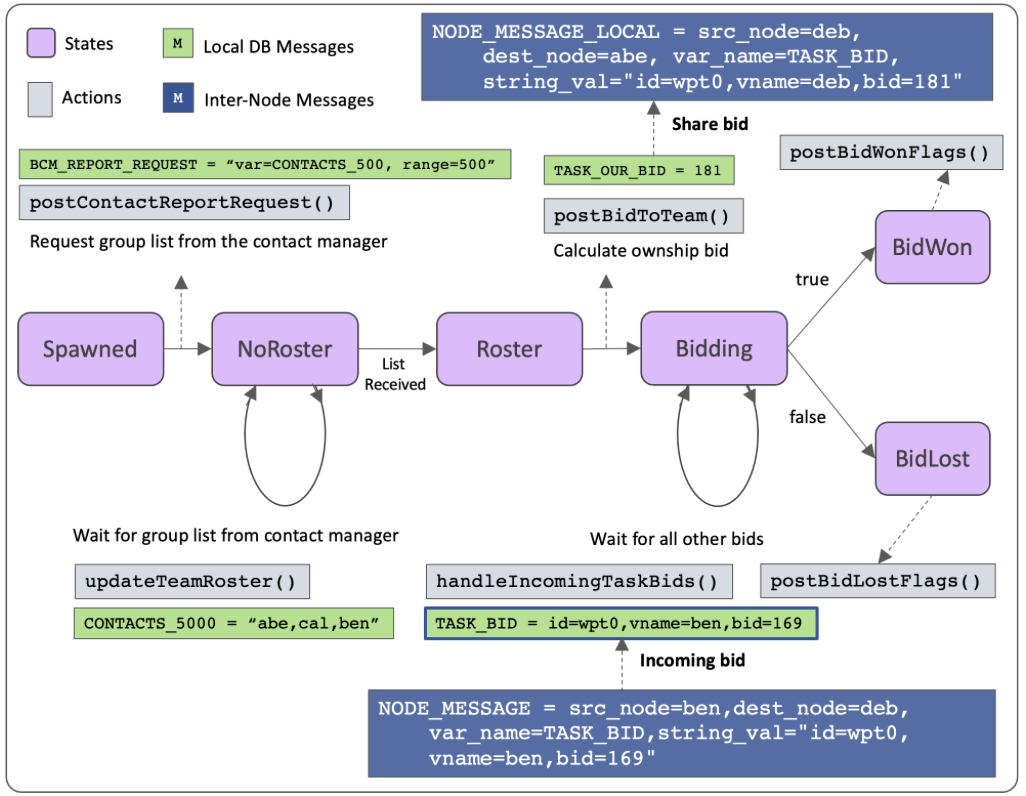
Figure 1.2: Task Behavior Progression: A task behavior proceeds through the states shown, beginning from initial spawning by the task manager, and generation of bids to collaborators. Depending on ownship bid compared to collaborators, the task behavior will generate further publications, i.e., flags, that will spawn the appropriate behavior to perform the task. The primary difference between different task behaviors is in the implementation of bid generation.
1.1 Configuration Parameters [top]
Certain configuration parameters available to LegRun behavior are are unique to the LegRun behavior and others are inherited from the IvPBehavior superclass. Here parameters unique to the LegRun behavior are presented.
The set of configuration parameters is long, and split into two groups. The first group deals mainly with the shape of the leg, including position, angle, length and nature of the Williamson turn. The LegRun behavior maintains an instance of a LegRun C++ class, and these parameters are essentially passed directly to that class. The remainder of the configuration parameters relate to the operation of the behavior.
Listing 1.1 - Configuration Parameters for the TaskBehavior Superclass.
| Parameter | Description |
| id: | TBD |
| src: | TBD |
| hash: | TBD |
| time: | TBD |
| type: | TBD |
| exempt: | TBD |
| max_bid_wins: | If true, then highest bid wins. |
| time_range: | TBD |
| team_by_group: | TBD |
| bidwonflag: | Posted when/if the behavior wins its auction. |
| bidlostflag: | Posted when/if the behavior loses its auction. |
| xbidwonflag: | TBD |
| xbidlostflag: | TBD |
| bid_value_var: | TBD |
| task_state_var: | TBD |
Listing 1.2 - Configuration Parameters for TaskMuster Behavior.
| Parameter | Description |
| waypt: | The x-y location of the waypoint. |
Listing 1.3 - Example Configuration Block.
name = tuster_
updates = TASK_MUSTER
templating = spawn
type = muster
max_bid_wins = false
team_range = 5000
team_by_group = true
#include plugs.bhv <muster_regions>
bidwonflag = UP_MUSTER = muster_region=$[REGION]
bidwonflag = MUSTER = true
bidwonflag = STATION = false
bidwonflag = RETURN = false
bidwonflag = CONVOY = false
bidwonflag = LAST_TASK=$[LAST_TASK]
// xbidwonflag = MISSION_TASK = type=convoy,id=convoy$[ID+1], [=\=]
contact=$[OWNSHIP],exempt=$[OWNSHIP]
xbidwonflag = MISSION_TASK = type=convoy,id=follow_$[OWNSHIP], [=\=]
contact=$[OWNSHIP],exempt=$[OWNSHIP]
}
1.2 Publications [top]
Listing 1.4 - Configuration Parameters for the LegRun Behavior.
| Variable | Description |
| TM_ALERT_REQUEST: |
1.3 Flags and Macros [top]
The TaskMuster behavior supports the below set of event flags in addition to the standard behavior flags, e.g., endflags, runflags. These are:
- bidwonflag: Posted when/if the behavior wins its auction.
- bidlostflag: Posted when/if the behavior loses its auction.
The following macros are supported in the TaskMuster behavior. These macros will be expanded in any event flag, including event flags defined for all IvP behaviors as well as event flags defined only for the TaskMuster behavior.
- PTX: The x location of the waypoint.
- PTY: The y location of the waypoint.
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF