Prev-Talk | Next-Talk | All-Talks | Talks-Sorted | MOOS-DAWG'24
Talk-26: A Brief Introduction of Draper's Autonomy Capabilities
Camila Francolin, Julius Rose, Mike Gratton, Draper
Draper is a not-for-profit research and development institution focused on solving some of the nation’s toughest technical challenges. We provide engineering services directly to government and industry; work on teams as prime contractor or subcontractor; and participate as a collaborator in consortia. We provide unbiased assessments of technology or systems designed or recommended by other organizations—custom designed, commercial/government off the shelf. Draper is a recognized world leader in Positioning, Navigation & Timing and Microsystems, with additional expertise in Precision Instrumentation, Fault-Tolerant Systems, Secure & Assured Systems, Autonomous Systems, Image & Data Analytics, Human Systems Technology, Materials Engineering & Microfabrication, and Biomedical Solutions.
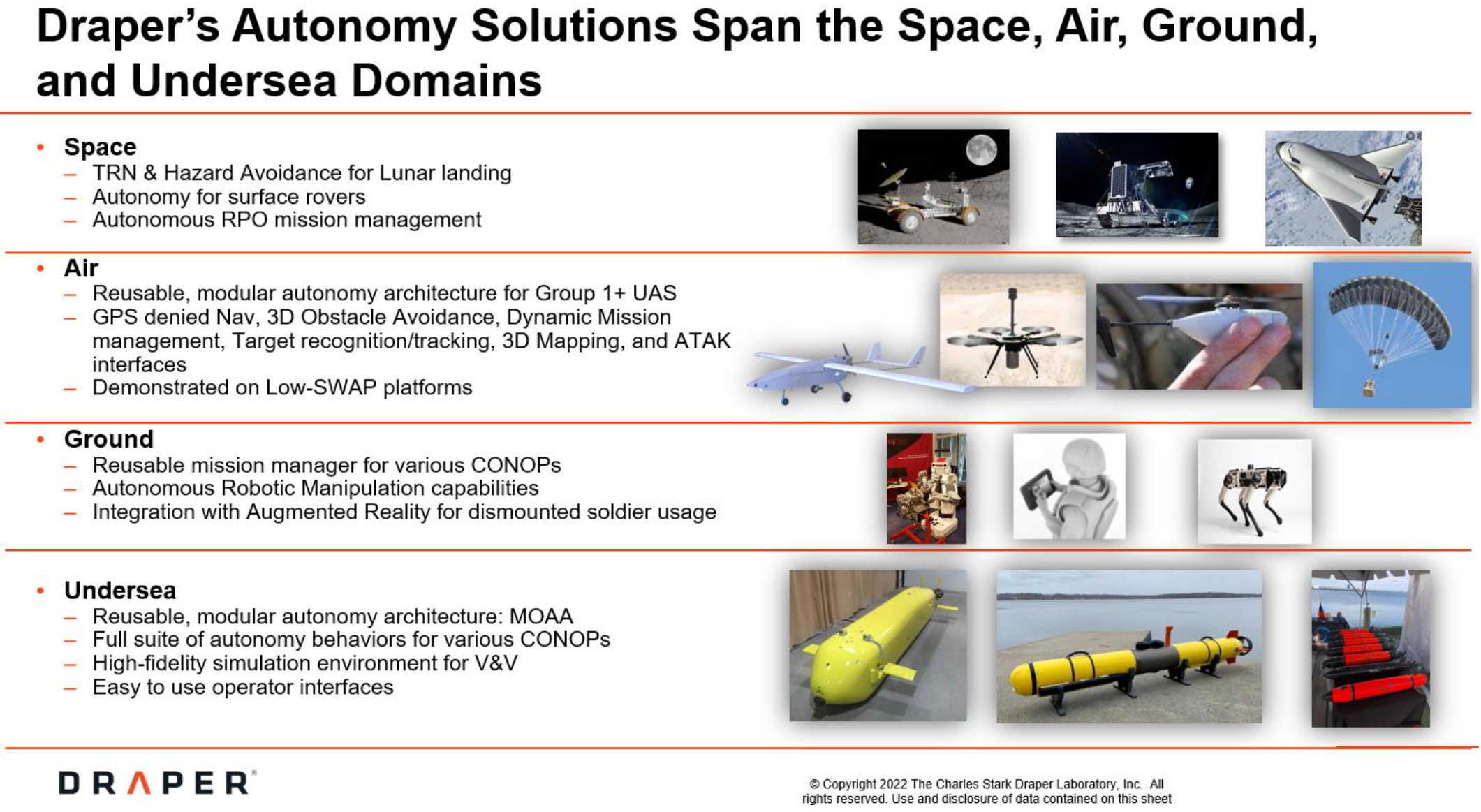
In this talk, we will introduce Draper’s autonomy capabilities. We have been developing autonomy for space, undersea, air, and ground applications since the 1980’s. Today, we maintain reusable autonomy frameworks across each of these domains, supporting missions such as ISR, mine reconnaissance, counter-UAS, target tracking, and Chemical/Biological/Radiation/Nuclear (CBRN) hazard mapping. Across each of these domains, our design philosophy remains constant: we are focused on developing capabilities that are modular, extensible, inter-operable, and vehicle-agnostic. This design philosophy has allowed us flexibility integrating smarts into whatever platform meets our mission/customer needs, while keeping integration timelines to a minimum. Our autonomy frameworks have been demonstrated and fielded across the space, air, and underwater domains.
Recently, recognizing the importance of maritime surface and cross-domain operations, Draper has started investing on the development of a maritime surface autonomy framework to add to our portfolio of available solutions. To that end, we have partnered with Mike Benjamin and the MIT Marine Autonomy Lab to develop a surface autonomy framework that integrates the “best of breed” from across existing solutions in this domain. We will investigate the state of the art available and aim to develop and demonstrate an architecture that can achieve maritime surface CONOPS, including COLREGS and multi- agent operations. We also hope to collaborate with others across the industry, including platform and autonomy providers who are looking to partner on future missions.
Categories:
- Autonomy