IvP Helm | Utils | Labs | Help
 One big PDF
One big PDF

02 Design Overview
03 MOOS Overview
04 Example Alpha
05 Helm as a MOOS App
06 Helm Autonomy
07 Behavior Properties
09 Waypoint Behavior
10 OpRegion Behavior
11 Loiter Behavior
12 PeriodicSpeed Behavior
13 PeriodicSurface Behavior
14 ConstantDepth Behavior
15 ConstHeading Behavior
16 ConstantSpeed Behavior
17 MaxDepth Behavior
18 GoToDepth Behavior
19 MemTurnLimit Behavior
20 StationKeep Behavior
21 Timer Behavior
22 TestFailure Behavior
24 AvoidCollision Behavior
25 AvdColregs Behavior
26 CutRange Behavior
27 Shadow Behavior
28 Trail Behavior
30 Example Charlie
31 Example Delta
32 Example Echo
33 Example Kilo
34 Example Berta
36 IvP Build Tools Overview
37 ZAIC Tools
38 Reflector Tools
39 Advanced Reflector Tools
40 A Short Example
Appendix Colors
Appendix Emacs
Appendix Logic
References
2 Trends in Marine Vehicles Technologies Affecting Autonomy
On board any modern AUV there are many technologies that collectively represent decades of work from people in complementary disciplines. These technologies not only complement each other, they challenge eath other. With each new advance in one area, new things are needed from other areas to keep pace with evolving mission requirements. Given any one type of mission description, certain technologies may seem to be of "higher risk" than others in achieving the mission objectives. Although subjective, the following is a useful categorization of technologies into platforms, sensors, compute-power, communications, and autonomy. We argue, in short, that autonomy is being challenged by what is now possible in the other four areas.
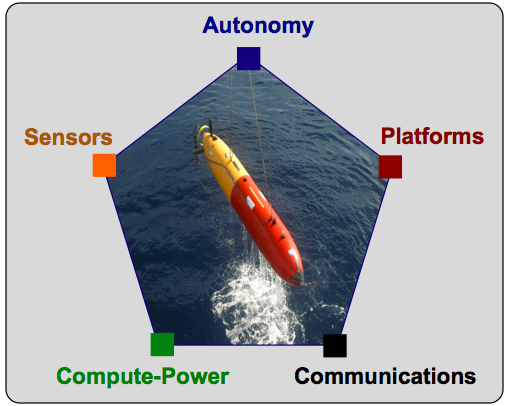
Figure 2.1: One way of grouping technologies comprising autonomous marine vehicles. The AUV pictured is one of two Ocean Explorer vehicles built by SeaRobotics for Florida Atlantic University. Both vehicles are owned and operated by the NATO Undersea Research Center (NURC), in La Spezia Italy.
Platform advances include the following handful of trends: the cost of entry level platforms is lower, vehicles are available in smaller man-portable sizes, reliability is higher, duration is higher, ease of physical maintenance is better, and modularity for adding third party equipment is better supported. AUV owners are no longer limited to organizations with large budgets, and increasingly, AUV owners have two or more platforms available. The reduction of AUV size alone has increased the frequency of operations by removing the need to lease costly research vessels with the cranes necessary to launch and recover vehicles. This in turn shortens the implement-learn-reimplement cycle and, coupled with the reduction of vehicle cost, reduces the risk-aversion to new types of autonomy algorithms.
Sensor advances include not only higher fidelity production of data, but also lower sensor cost, and smaller sizes to keep pace with smaller diameter platforms. The ease of integration has also generally improved since integration cost, in terms of engineer labor, is often a non-trivial cost component in a purchase decision. Sensor advances include improved and cheaper navigation components such as commercial GPS and inertial navigation units (INUs). As of this writing, a GPS unit is standard equipment on even entry level platform configurations. INUs are still mostly found on more expensive configurations, but there seem to be low-cost choices emerging that may change that soon. Sensor advances challenge autonomy since it gives autonomy algorithms the input upon which to make dynamic and adaptive decisions, and the improved navigation (coupled with improved platform endurance) means that vehicles may be underwater much longer, depending on their own autonomy algorithms to guide them.
Advances in on-board computing power have also come at a reduced cost and, perhaps more important, reduced power consumption and residual heat generation. The reduced power consumption improves endurance and reduction of heat means higher powered processes can be afforded in the air-tight hard to cool modules that house them. The increase in computing power means that sensor processing algorithms may be applied to the stream of incoming data rather than post-processed after vehicle recovery. This sensor information in turn can be used to feed autonomy algorithms used to dynamically adapt the vehicle to either better improve the chances of mission success, or adapt the vehicle to improve the sensor quality itself (or both hopefully). The increase in computing power also enables the more compute-intensive autonomy algorithms.
Communications advances include satellite communications, radio links like 802.11, and most importantly for underwater vehicles, acoustic modem communications. The commercial availability of satellite links such as Iridium allow a certain amount of remote control of AUVs by allowing the vehicle to periodically receive a set of waypoints from a remote user, or remote planning system. Most glider platforms currently operate in this manner. For AUV systems with full on-board autonomy, the satellite link at least provides a safety mechanism fallback for recovering a lost vehicle. This in turn affords the user a safety net to experiment with more non-deterministic, long-endurance autonomy missions. The WiFi links often allow a direct link between a ship's science crew and a vehicle, typically up to a mile away. This link, even if it is not envisioned as part of the end-product communication structure, is of enormous practical importance in field exercises. It allows an operator a relatively high bandwidth connection for remote logins, to run system checks, off-load data, and even update code or a mission configuration on a vehicle while it remains in the water - often obviating the need for time consuming physical recovery and re-deployment of the vehicle. Even with the substantial advances in underwater communications in the last ten years, the range and bandwidth is severely limited compared to WiFi and satellite links. Nevertheless, underwater communications opens the door to the development of autonomy on vehicles that may collaborate with each other underwater and collaborate with vehicles deployed at the surface. These surface vehicles may act as either as a communications gateway to a larger networked system of vehicles and users, or act as a navigation aid to the underwater vehicle.
Collectively, the advances in platforms, sensors, computing power and communications have changed what is possible with unmanned marine vehicles and what is expected from the on-board autonomy algorithms. The progression depicted in Figure 2.2 conveys the rough relationship between these technology developments and the types of autonomy they enable. In missions characterized as deterministic, vehicles are deployed typically with a set of waypoints at prescribed depths or altitudes, they collect sensor data, are physically recovered from the water, and their data is analyzed on the bench. The autonomy is relatively simple in these scenarios because there is not much in the way of new information available to the autonomy system as the mission progresses. In these cases, the notion of vehicle autonomy is often blurred with related but distinctly separate disciplines of vehicle-control and mission-planning.
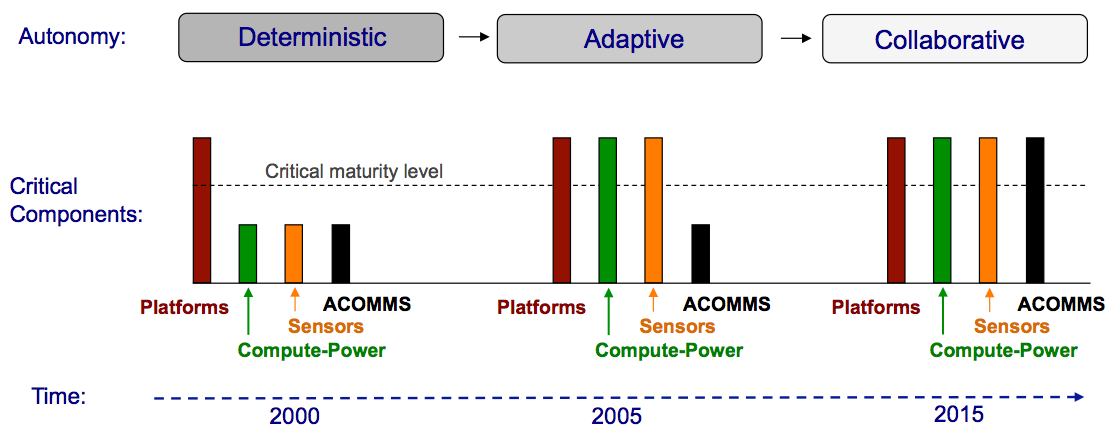
Figure 2.2: The relationship between unmanned vehicle technologies and the types of autonomy missions they enable.
In missions characterized by adaptive autonomy, vehicles have the sensors and on-board computing power to observe and make conclusions about their observations that may affect how the mission progresses. A mission may indeed still be based on a set of waypoints, but they may potentially be much more flexible. A vehicle may, for example, repeat a subset of waypoints if it determines that the sensor data it was collecting was somehow corrupted. It may generate a new sub-mission entirely if it senses an event of interest, or it may abort and return early if its mission objectives are completed earlier than expected. The possibilities are endless. However, one common thread of adaptive autonomy is that mission specifications look less like a prescribed sequence of tasks, and more like a state diagram with spefications of autonomy for each state and conditions for transitioning between states. More on this in Section 7.4 .
In collaborative autonomy missions, vehicles may have the means to communicate with other vehicles, or communicate with remote users or software systems. For AUVs, this is largely due to advances in underwater acoustic communications, but satellite links also open the door for inter-vehicle collaboration and remote influence, as typified by glider operations. In both cases, part of the consideration needed in an autonomy system is the issue of how, or when to establish a communications link to another node in the network. For AUVs this may mean considering what events may trigger a trip to the surface for a satellite, or what underwater trajectories would keep it within ACOMMS range to other deployed AUVS or surface vehicles. The issues get interesting when communications objectives begin to compete with or outright conflict with otherwise stated mission objectives.
The timeline in Figure 2.2 is (one person's) rough correlation indicating what technologies and autonomy are "commonly" available on typical entry-level-configured unmanned marine vehicle platforms. Certainly this timeline could be shifted in one direction to reflect the early technologists who had advanced capabilities and equipment sooner than the masses. On the flipside, this timeline could be shifted in the other direction to reflect what kinds of systems and autonomy capabilities are actually being routinely deployed and trusted by end-users in the field. In this latter regard, deterministic, non-collaborative, non-adaptive autonomy systems perhaps more aptly characterize the current state of the field.
From the perspective of an operator responsible for not losing a million-dollar vehicle, deterministic looks pretty good. Hovever, as the performance gains achieved by adaptive, collaborative autonomy that exploit all the other technology advances discussed here become more evident and commmon-place, and as vehicle cost and the corresponding risk-aversion go down, there will be an undeniable seat at the table for the newer types of autonomy.
Page built from LaTeX source using the texwiki program.