
- Design Overview
- MOOS Overview
- Example Mission Alpha
- IvPHelm as a MOOS App
- Helm Autonomy
- Behavior Properties
- BHV_Waypoint
- BHV_OpRegion
- BHV_OpRegionV24
- BHV_Loiter
- BHV_PeriodicSpeed
- BHV_PeriodicSurface
- BHV_ConstantDepth
- BHV_ConstHeading
- BHV_ConstantSpeed
- BHV_MaxDepth
- BHV_GoToDepth
- BHV_MemoryTurnLimit
- BHV_StationKeep
- BHV_LegRun
- BHV_FixedTurn
- BHV_ZigZag
- BHV_Timer
- BHV_TestFailure
The Echo Mission
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
src: project-pavlab/chapters/chap_xmiss_echo
1 The Echo Mission
1.1 Overview of the Echo Mission Components and Topics
1.2 Launching the Echo Mission
1.3 Topic #1: The BearingLine Behavior
1.4 Topic #2 Dynamic Behavior Spawning
1.5 Topic #3: Sending Updates to the Original and Spawned Behaviors
1.6 Suggestions for Tinkering
1 The Echo Mission
The primary purpose of the Echo example mission is to illustrate the use of dynamically spawned behaviors. A simple behavior, the BearingLine behavior, is used to illustrate the idea. The BearingLine behavior simply posts a viewable point and viewable line segment representing the bearing from the present position of the vehicle to a fixed point in the operation area. Each new "bearing point" posted to the MOOSDB results in a newly spawned BearingLine behavior in the helm.
1.1 Overview of the Echo Mission Components and Topics [top]
| Behaviors: | Waypoint, BearingLine |
| MOOS Apps: | pHelmIvP, pLogger, uSimMarine, pMarinePID, pNodeReporter, pMarineViewer |
| Primary Topics: | (1) The BearingLine behavior. (2) Dynamic behavior spawning. (3) Sending updates to the original and spawned behaviors. |
| Side Topics: | (1) uTimerScript is used to auto-generate events with random components that lead to behavior spawning. (2) uHelmScope may be used to monitor the spawning and death of behaviors in the helm. |
1.2 Launching the Echo Mission [top]
The echo mission may be launched from the command line:
$ cd moos-ivp/missions/s5_echo/ $ ./launch.sh --warp=10
This should bring up a pMarineViewer window like that shown in , with a single vehicle, henry, initially having the "PARK" helm state. After hitting the DEPLOY button in the lower right corner, the vehicle enters the "SURVEYING" mode and begins to proceed along the waypoints as shown.
1.3 Topic #1: The BearingLine Behavior [top]
In , note the line segment rendered from the vehicle in the direction of point (100, -100). This line segment is posted to the MOOSDB by the IvP Helm on behalf of the BearingLine behavior. This behavior does not influence the trajectory of the vehicle at all. The line segment acts as an easy visual confirmation that the behavior is instantiated and running properly. In the Echo mission this behavior is configured as in . The bearing line originates from the present vehicle position toward the point specified on line 8. The length of the line is 50% of the present distance between the vehicle and the bearing point, as specified on line 7. The bearing point is also configured to be rendered by the configuration on line 9.
Listing 1.1 - Configuration of the BearingLine behavior in the Echo example mission.
[[#lst_echo_mission]]
1 Behavior = BHV_BearingLine
2 {
3 name = bng-line
4 templating = clone
5 updates = BEARING_POINT
6
7 line_pct = 50
8 bearing_point = 100,-100
9 show_pt = true
10 }
The BearingLine behavior produces no (IvP) objective function, so by the definition of the behavior run states (Section ???), it is never in the active state. In the Echo mission, the BearingLine behavior is in the running state when the vehicle is surveying the five waypoints shown in . This can be confirmed by launching a uHelmScope window:
$ uHelmScope moos-ivp/ivp/missions/s5_echo/echo.moos -x -p}
The output should be similar to that shown in below. Note the Waypoint behavior is active, line 12, and the BearingLine behavior is in the running state, line 14.
Listing 1.2 - Output of the uHelmScope tool during the execution of the Echo mission.
[[#lst_echo_uhs_a]] 1 ============== uHelmScope Report ============== DRIVE (8) 2 Helm Iteration: 173 (hz=0.25)(5) (hz=0.25)(100) (hz=0.26)(max) 3 IvP functions: 1 4 Mode(s): 5 SolveTime: 0.00 (max=0.01) 6 CreateTime: 0.00 (max=0.01) 7 LoopTime: 0.00 (max=0.01) 8 Halted: false (0 warnings) 9 Helm Decision: [speed,0,4,21] [course,0,359,360] 10 course = 189.0 11 speed = 2.0 12 Behaviors Active: ---------- (1) 13 waypt_survey (43.0) (pwt=100.00) (pcs=6) (cpu=0.17) 14 Behaviors Running: --------- (1) 15 bng-line (43.0) (upd=0/0) 16 Behaviors Idle: ------------ (1) 17 waypt_return 18 Behaviors Completed: ------- (0) 19 20 # MOOSDB-SCOPE ------------------------------------ (Hit '#' to en/disable) 21 @ BEHAVIOR-POSTS TO MOOSDB ----------------------- (Hit '@' to en/disable)
1.4 Topic #2 Dynamic Behavior Spawning [top]
The Echo mission is configured to allow dynamic behavior spawning for the BearingLine behavior. Lines 4 and 5 in allow the spawning by configuring templating to be enabled on line 4, and specifying the MOOS variable through which spawning requests are received on line 5. Recall that templating can be enabled with either the "clone" or "spawn" options. In this case, "clone" option was chosen to allow the instantiation of one initial instance upon helm start-up, with the parameter configuration shown.
In this example, the pMarineViewer is configured to convert left-mouse clicks into posts of the BEARING_POINT variable to the MOOSDB, triggering the spawning of new BearingLine instances. A mouse click over the point (-5, -58) results in the post:
BEARING_POINT = "name=bng-line-5.0--158.0, bearing_point=-5.0,-158.0"
The helm receives mail for the BEARING_POINT variable since it registers automatically for each variable specified in any behavior configured with the updates parameter. The helm examines this string before applying the update, and notes that the behavior name specified is unique (not currently instantiated) and rather than interpreting this as a request to update the existing BearingLine behavior already instantiated, interprets it as a request to spawn a new BearingLine instance if templating is enabled (which it is). The new behavior is spawned, with the behavior name specified. In this case the behavior name is based on the coordinates of the point clicked by the user. Two successive clicks on the same point will result in two posts to BEARING_POINT by pMarineViewer, but the second post will be effectively ignored by the helm. (It is read by the helm, but since the behavior name is one that is already known to the helm, the update is applied to that existing behavior instance. In this case such an update to the bearing_point parameter would be redundant.
After two such user mouse clicks, there will be two new BearingLine behaviors instantiated, and the situation would look similar to that shown in . If the uHelmScope tool is still connected as above, the output would looks similar to that shown in . Note the existence of three running BearingLine behavior instances reported in lines 15-17. The instance on line 15 was created upon helm startup, and the instances on lines 16-17 were created upon the user mouse clicks.
Listing 1.3 - Output of the uHelmScope tool during the later execution of the Echo mission.
[[#lst_echo_uhs_b]] 1 ============== uHelmScope Report ============== DRIVE (12) 2 Helm Iteration: 279 (hz=0.25)(5) (hz=0.25)(100) (hz=0.26)(max) 3 IvP functions: 1 4 Mode(s): ACTIVE:SURVEYING 5 SolveTime: 0.00 (max=0.01) 6 CreateTime: 0.00 (max=0.01) 7 LoopTime: 0.00 (max=0.01) 8 Halted: false (0 warnings) 9 Helm Decision: [speed,0,4,21] [course,0,359,360] 10 course = 180.0 11 speed = 2.0 12 Behaviors Active: ---------- (1) 13 waypt_survey (69.6) (pwt=100.00) (pcs=4) (cpu=0.28) 14 Behaviors Running: --------- (3) 15 bng-line (69.6) (upd=0/0) 16 bng-line-5--58 (66.1) (upd=1/1) 17 bng-line13--124 (56.8) (upd=1/1) 18 Behaviors Idle: ------------ (1) 19 waypt_return 20 Behaviors Completed: ------- (0) 21 22 # MOOSDB-SCOPE ------------------------------------ (Hit '#' to en/disable) 23 @ BEHAVIOR-POSTS TO MOOSDB ----------------------- (Hit '@' to en/disable)
1.5 Topic #3: Sending Updates to the Original and Spawned Behaviors [top]
The action associated with the left-mouse click in the Echo mission is configured in the pMarineViewer configuration block in echo.moos by:
left_context[bng_point] = BEARING_POINT = name=bng-line$(X)-$(Y) # bearing_point=$(X),$(Y)
Setting the context for the left and right mouse clicks in pMarineViewer is is achieved by utilizing the Mouse Context feature of pMarineViewer, discussed in the pMarineViewer documentation, \cite{?} , in the section "Contextual Mouse Poking with Embedded OpArea Information". With the above configuration a left-mouse click may result in the following if clicked at the point (-5, -58):
BEARING_POINT = name=bng-line-5--58 # bearing_point=-5,-58
Updating or changing the prevailing parameters for existing behaviors is possible via the use of the MOOS variable specified in the updates parameter for each behavior. The only difference between an update that changes parameters of an existing behavior, and an update that spawns a new behavior is the inclusion of a name=<behavior-name> as above. If this component is present in the string posted to the MOOSDB and the <behavior-name> specifies an existing behavior, then that behavior only will have its parameters updated. If it does not specify an existing behavior, a new behavior will be spawned with the specified name. If the name=<behavior-name> component is not included in the posting, then the update will be applied to all behaviors configured to receive updates via that particular MOOS variable.
This case is a bit interesting since all newly spawned behaviors specify the same MOOS variable for receiving updates. Indeed a single poke to the MOOS variable BEARING_POINT could result in the simultaneous configuration modification of all instantiated BearingLine behaviors. In the Echo mission, pMarineViewer is configured to make the following pokes to the MOOSDB via the ACTION pull-down menu:
action = BEARING_POINT = show_pt=true action+ = BEARING_POINT = show_pt=false action = BEARING_POINT = line_pct=0 action = BEARING_POINT = line_pct=25 action = BEARING_POINT = line_pct=50 action = BEARING_POINT = line_pct=75 action+ = BEARING_POINT = line_pct=100 action = BEARING_POINT = "name=bng-line # line_pct=0" action = BEARING_POINT = "name=bng-line # line_pct=50" action = BEARING_POINT = "name=bng-line # line_pct=100"
The first two actions will turn on or off the rendering of the bearing points posted by each behavior. The next five actions will adjust the rendering length of the posted bearing line by each behavior. The last two actions will adjust the rendering length of the posted bearing line only for the behavior named "bng-line", the behavior spawned at the time of helm start-up.
1.6 Suggestions for Tinkering [top]
- After the mission is launched, use the ACTION pull-down menu in pMarineViewer to select AUTO_SPAWN=true. This enables a script via uTimerScript that automatically generates new bearing points, spawning new behaviors. These behaviors have their durations set randomly by the script to be in range [5,10] seconds. Note the new bearing lines emerging and moving with the vehicle until the behavior dies. The script will lead to the spawning (and death) of 5000 behaviors over the course of about two hours of simulation at MOOSTimeWarp=1.
- With AUTO_SPAWN=true as above, let the vehicle return to the launch point (by clicking the RETURN button in the pMarineViewer window. After it reaches the return point and perhaps sits for a bit, hit the DEPLOY button once again to return the vehicle into its SURVEYING mode. Notice that initially there are many bearing lines rendered before returning to only a handful of bearing lines after a few seconds of simulation. This is because newly spawned behaviors do not start their duration clock until the first time the behavior enters the running state. All behaviors spawned while returning to the start point are effectively put on hold until the vehicle is re-deployed. Then they all start their duration clocks simultaneously and all die off 5-10 seconds later.

Figure 1.1: The Echo Mission (1): The vehicle "henry" traverses waypoints with the Waypoint behavior. The BearingLine behavior generates a viewable "bearing point" at (100, -100), and a viewable "bearing line".
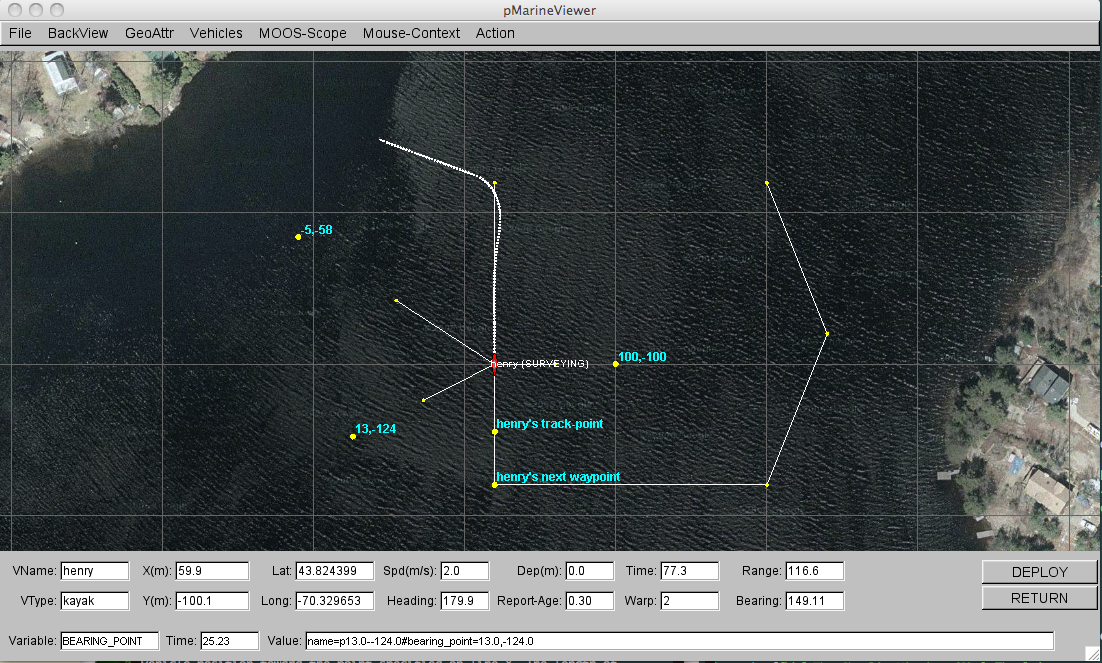
Figure 1.2: The Echo Mission (2): The user has clicked two new bearing points, (-5, -58), and (13, -124), and two new BearingLine behaviors have been spawned, each generating bearing line and bearing point visual outputs.
Document Maintained by: mikerb@mit.edu
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF