IvP Helm | Utils | Labs | Help
 One big PDF
One big PDF

02 Design Overview
03 MOOS Overview
04 Example Alpha
05 Helm as a MOOS App
06 Helm Autonomy
07 Behavior Properties
09 Waypoint Behavior
10 OpRegion Behavior
11 Loiter Behavior
12 PeriodicSpeed Behavior
13 PeriodicSurface Behavior
14 ConstantDepth Behavior
15 ConstHeading Behavior
16 ConstantSpeed Behavior
17 MaxDepth Behavior
18 GoToDepth Behavior
19 MemTurnLimit Behavior
20 StationKeep Behavior
21 Timer Behavior
22 TestFailure Behavior
24 AvoidCollision Behavior
25 AvdColregs Behavior
26 CutRange Behavior
27 Shadow Behavior
28 Trail Behavior
30 Example Charlie
31 Example Delta
32 Example Echo
33 Example Kilo
34 Example Berta
36 IvP Build Tools Overview
37 ZAIC Tools
38 Reflector Tools
39 Advanced Reflector Tools
40 A Short Example
Appendix Colors
Appendix Emacs
Appendix Logic
References
13 The PeriodicSurface Behavior
13.1 Configuration Parameters
13.2 Detailed Discussions of Behavior Parameters
13.2.1 The period Parameter
13.2.2 The mark_variable Parameter
13.2.3 The pending_status_var Parameter
13.2.4 The atsurface_status_var Parameter
13.2.5 The ascent_speed Parameter
13.2.6 The ascent_grade Parameter
13.2.7 The zero_speed_depth Parameter
13.2.8 The max_time_at_surface Parameter
13.3 Internal States of Periodic Surface Behavior
This behavior will periodically influence the depth and speed of the vehicle while remaining neutral at other times. The purpose is to bring the vehicle to the surface periodically to achieve some event specified by the user, typically the receipt of a GPS fix. Once this event is achieved, the behavior resets its internal clock to a given period length and will remain idle until a clock time-out occurs.
13.1 Configuration Parameters [top]
Listing 13.1 - Configuration Parameters Common to All Behaviors.
| activeflag: | A MOOS variable-value pair posted when the behavior is in the active state. Section 6.5.4. |
| condition: | Specifies a condition that must be met for the behavior to be running. Section 6.5.1. |
| duration: | Time in behavior will remain running before declaring completion. Section 7.2.6. |
| duration_idle_decay: | When true, duration clock is running even when in the idle state. Section 7.2.6. |
| duration_reset: | A variable-pair such as MY_RESET=true, that will trigger a duration reset. See Section 7.2.6. |
| duration_status: | The name of a MOOS variable to which the vehicle duration status is published. Section 7.2.6. |
| endflag: | A MOOS variable-value pair posted when the behavior has completed. Section 6.5.4. |
| idleflag: | A MOOS variable-value pair posted when the behavior is in the idle state. Section 6.5.4. |
| inactiveflag: | A MOOS variable-value posted when the behavior is not in the active state. Section 6.5.4. |
| name: | The (unique) name of the behavior. Section 7.2.2. |
| nostarve: | Allows a behavior to assert a maximum staleness for a MOOS variable Section 7.2.9. |
| perpetual: | If true allows the behavior to to run even after it has completed. Section 7.2.7. |
| post_mapping: | Re-direct behavior output normally to one MOOS variable to another instead. Section 7.2.4. |
| priority: | The priority weight of the behavior. Section 7.2.3. |
| pwt: | Same as priority. |
| runflag: | A MOOS variable and a value posted when a behavior has met its conditions. Section 6.5.4. |
| spawnflag: | A MOOS variable and a value posted when a behavior is spawned. Section 6.5.4. |
| templating: | Turns a behavior into a template for spawning behaviors dynamically. Section 7.7. |
| updates: | A MOOS variable from which behavior parameter updates are read dynamically. Section 7.2.5. |
Listing 13.2 - Configuration Parameters for the PeriodicSurface Behavior.
| Parameter | Description |
| acomms_mark_variable | The incoming MOOS variable for resetting the acomms period clock. |
| ascent_grade | Manner in which desired speed approaches zero on the approach to the surface. The default is linear. Section 13.2.6. |
| ascent_speed | Desired speed of the vehicle during the ascent mode. Section 13.2.5. |
| atsurface_status_var | MOOS variable indicating number of seconds at the surface. Section 13.2.4. |
| mark_variable | The incoming MOOS variable for resetting the period clock. Section 13.2.2. |
| max_time_at_surface | The maximum time, in seconds, the vehicle will wait at the surface. Section 13.2.8. |
| pending_status_var | MOOS variable written to with remaining time on idle clock. Section 13.2.3. |
| period | Duration of the WAITING mode. Section 13.2.1. |
| zero_speed_depth | The depth, in meters, at which the desired speed becomes zero on ascent. Section 13.2.7. |
Listing 13.3 - Example Configuration Block.
Behavior = BHV_PeriodicSurface
{
// General Behavior Parameters
// ---------------------------
name = periodic_surface // example
pwt = 100 // default
condition = MODE==TRANSITING // example
updates = PSURFACE_UPDATES // example
// Parameters specific to this behavior
// ------------------------------------
acomms_mark_variable = ACOMMS_RECEIVED // example
ascent_grade = linear // default
ascent_speed = -1 // default
atsurface_status_var = TIME_AT_SURFACE // default
mark_variable = GPS_UPDATE_RECEIVED // default
max_time_at_surface = 300 // default
pending_status_var = PENDING_SURFACE // default
period = TIME_AT_SURFACE // default
zero_speed_depth = 0 // default
}
13.2 Detailed Discussions of Behavior Parameters [top]
13.2.1 The period Parameter [top]
The period parameter sets the duration of the period, in seconds, during which the behavior will remain in the IDLE_WAITING state.
13.2.2 The mark_variable Parameter [top]
The mark_variable names a variable used for indicating when the behavior witnesses the event that would reset the period clock. On each iteration, the variable is checked against its last known value and if different, the clock is reset. The default value for this parameter is GPS_UPDATE_RECEIVED. If this variable is populated by another process with a value indicating the time a GPS fix is obtained, then the mark will occur on each GPS fix. Since the value of this argument names a MOOS variable, it is case sensitive.
13.2.3 The pending_status_var Parameter [top]
The pending_status_var names a variable to be written to with the value of the remaining time on the idle clock, rounded to integer seconds. The default value is PENDING_SURFACE. Since the value of this argument names a MOOS variable, it is case sensitive.
13.2.4 The atsurface_status_var Parameter [top]
The atsurface_status_var parameter names a variable to be written to with the number of seconds that the vehicle has been waiting at the surface (for the event indicated by the MOOS variable specified in the mark_variable parameter). The number of seconds is rounded to the nearest integer and will be zero when the vehicle is not at the surface. The default value is time_at_surface. Since the value of this parameter names a MOOS variable, it is case sensitive.
13.2.5 The ascent_speed Parameter [top]
The ascent_speed parameter indicates the desired speed (m/s) of the vehicle during the ascent state. If left unspecified, the ascent speed will be equal to the current noted speed at moment it transitions into the ascent state.
13.2.6 The ascent_grade Parameter [top]
The ascent_grade parameter indicates the manner in which the ascent speed approaches zero as the vehicle progresses toward the zero_speed_depth. It has four legal values: fullspeed, linear, quadratic, and quasi. The default is linear. In all four cases, the initial speed is determined by the parameter ascent_speed, and the desired speed will be zero once the zero_speed_depth has been achieved. The four settings determine the manner of slowing to zero speed during the ascent. The fullspeed setting indicates that desired speed should remain constant through the ascent right up to the instant the vehicle achieves zero_speed_depth. For the other three settings the speed reduction is relative to the starting depth (the depth noted at the outset of the ascent state) and the zero_speed_depth. With the linear setting, the speed reduction is linear. With the quadratic setting, the speed reduction is quadratic (quicker initial speed reduction). With the quasi setting the speed reduction is between linear and quadratic. The value passed to this parameter is not case sensitive.
13.2.7 The zero_speed_depth Parameter [top]
The zero_speed_depth parameter sets the depth (in meters) during the ascent state at which the desired speed becomes zero, and presumably further ascent is achieved through positive buoyancy.
13.2.8 The max_time_at_surface Parameter [top]
The max_time_at_surface parameter sets the maximum time (in seconds) spent in the AT_SURFACE state, waiting for the event indicated by the mvar_variable, before the behavior transitions into the IDLE state.
13.3 Internal States of Periodic Surface Behavior [top]
The behavior can be in one of four states as described in Figure 13.1 below.
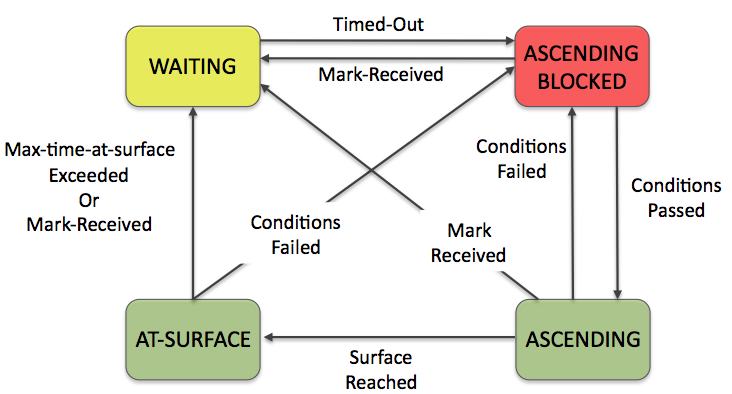
Figure 13.1: Possible modes of the PeriodicSurface behavior.
In the WAITING state the behavior is simply waiting for its clock to wind down to zero. The duration is given by the period parameter listed below. The clock is active despite any other run conditions that may apply to the behavior. It is started when the behavior is first instantiated and also when the desired event occurs at the surface. The ASCENDING_BLOCKED state indicates that the behavior timer has reached zero, but another run condition has not been met. This is to prevent the behavior from trying to surface the vehicle when other circumstances override the need to surface. In the ASCENDING state, the behavior will produce an objective function over depth and speed to bring the vehicle to the surface. A couple parameters described below can determine the trajectory of the vehicle during ascent. This state can transition back to the ASCENDING_BLOCKED state if run conditions become no longer satisfied prior to the vehicle reaching the surface. In the AT_SURFACE state the vehicle is at the surface waiting for a specified event.
Page built from LaTeX source using the texwiki program.