Vehicles

Software Trees
Equipment
- Servicing the Heron
- Configure New Heron
- GPS Config Solution
- Heron Batteries
- PABLO
- GPS/E-Stop Equip
- Known Issues
- Imu Calibration Tips
- Repair and parts
Network
Attic
A Brief History of USV Autonomy Platforms at MIT
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
Introduction
The MIT autonomy software has been in development on campus since roughly 2000. This sofware has been developed in simulation and on robotic platforms, both underwater and surface. Initially the target platform was underwater, the Bluefin 21-inch unmanned underwater vehicle (UUV) as part of the ONR GOATS program. Soon after, relatively low-cost unmanned surface vehicle (USV) platforms were introduced as a means of intermediate field testing prior to UUV deployments. Over time the mission, sponsors and platforms have evolved. This document provides a brief history.
The Early Days (Early 2000s)
The GOATS (Generic Ocean Array Technology Sensors) was a project, initiated in 1998 in collaboration between MIT and NURC, with the long-term objective of developing net-centric, autonomous underwater vehicle sensing concepts for littoral MCM and ASW. This project was funded by ONR Code 32. The core of the program was the exploitation of collaborative and environmentally adaptive, bi- and multi-static, passive and active sonar configurations for concurrent detection, classification and localization of subsea and bottom objects. Prof. Henrik Schmidt was the Principal Invesigator, with Prof. John Leonard as the Co-investigator.
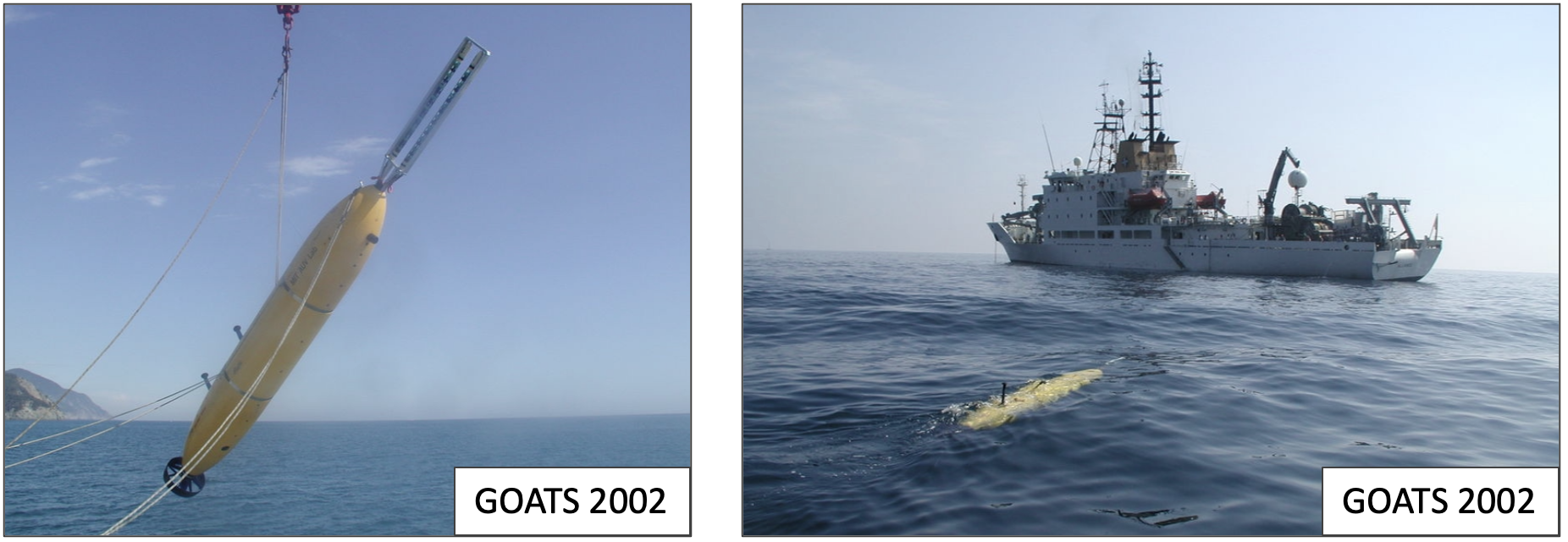
Figure 2.1: The MIT Bluefin 21 inch UUVs at the GOATS 2002 exercise in Italy 2002, with the NATO Underseah Reseach Centre (NURC), now known as the NATO Centre for Maritime Research and Exploration (CMRE).
During this era, UUVs typically ran missions that were largely scripted. Sensor data was primarily recorded for post-mission processing and analysis. Furthermore, in this era the 21-inch UUVs and the daily cost of ships to deploy them, were extremely expensive. Even though UUVs contained fail-safes such as drop-weights and acoustic locators, the conservative nature of scripted missions was a welcome feature that ensured that a UUV would run a predictable course and surface at a predictable location.
Even during this era, it was becoming obvious that UUVs were capable of processing their on-board sensor data during the mission, and using that data to make unscripted maneuver decisions. While adaptive autonomy may have only limited advantages in searching for mines, it has enormous advantages in searching marine mammals or other non-stationary underwater objects or ocean phenomena of interest.
The drawback of adaptive autonomy is that it introduces risk of vehicle loss. In developing autonomy that adapts to sensed events, care must be taken to consider the variations of sensed events to ensure the autonomy system does not produce unexpected maneuver decisions, resulting in vehicle loss. Proper simulation plays an important role in ensuring the autonomy, but there is a saying (commonly attributed to Rodney Brooks) "In simulation, you are doomed to succeed".
To expand our UUV autonomy development to be based on a truly adaptive and multi-vehicle collaborative structure, we needed to improve our simulation to include simulated sensor, a simulated ocean environment, and a multi-vehicle simulation capability. But equally important, we needed to find access to a low-cost marine robotic platform that could serve as a proxy for UUV missions prior to actual UUV deployments on research vessels.
The Autonomous Kayaks (Mid-late 2000s)
After GOATS 2002, Prof. John Leonard, brainstorming with Joseph Curcio, an MIT Ocean Engineering alumnus from the nineties, conjured the idea of a low-cost autonomous kayak, made mostly from commercial off-the-shelf (COTS) components. Joe initially made four kayaks called SCOUT (Surface Craft for Oceanographic and Undersea Testing) with major contributions from Andrew Patrikalakis, a former member of John Leonard's lab and MIT student (Curcio 2005). Soon afterward, in roughly 2004, four more kayaks were constructed for the Navy for use by Mike Benjamin, stationed at MIT as a visiting scientist. These kayaks were purchased from Robotic Marine Systems, the company recently launched by Joseph Curcio primarily to sell the SCOUT platform to non-MIT groups.
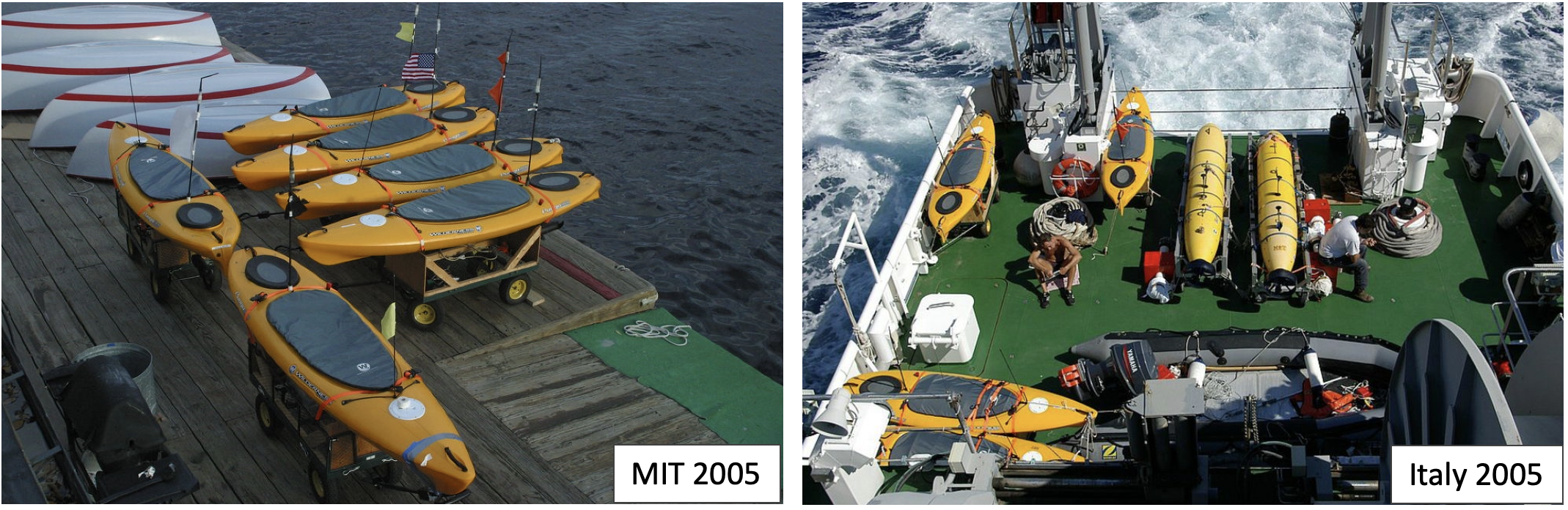
Figure 3.1: The MIT autonomous kayak (SCOUT) platforms, shown on the left on the docks of the MIT Sailing Pavilion, and on the right on the back deck of the R/V Leonardo in an exercise in Italy. The latter photo by Alex Bahr, a former PhD student of John Leonard, and co-founder of present-day Hydromea.
During late 2003 and into 2004, the MOOS software (Newman) and IvP software packages were merged into MOOS-IvP and field tested on the autonomous kayaks on the Charles River. During this period the first COLREGS collision avoidance algorithms were developed and tested, (Benjamin 2004). In 2005, the MIT SCOUT platforms were further field-tested during the Focused Acoustic Field 2005 (FAF'05) experiments in Pianosa Italy. FAF'05 was also funded by ONR Code 32. During the first part of this exercise, Paul Newman and Mike Benjamin conducted MOOS-IvP experiments on the autonomous kayaks in the waters off Pianosa. Toward the end of this exercise, the code was migrated from the kayaks onto the Bluefin UUV and deployed on the last day of experiments.
From mid-2005 until summer of 2006, the kayaks at MIT were further used for autonomy development in preparation for a major UUV exercise in Monterey Bay in August of 2006 (MB'06). The MIT Bluefin UUV ran for the first time using what we now called the payload autonomy arrangement with MOOS-IvP running on the backseat science computer and Bluefin control and navigation software running on the front seat computer. This was a major milestone in autonomy development for two reasons. First was the use of the payload autonomy arrangement working on a secondary computer in concert on a commercial vehicle, coordinated with the native manufacturer's software. This arrangement was the brain child of Dr. David Battle, a post-doc at the time at MIT, and co-founder of present-day Mission Systems in Australia. The second milestone of MB'06 was a subtle but important shift in the structure of the autonomy mission itself. Prior to 2006, missions were structured as a fixed sequence of events, culminating with a surfacing and recovery after the last event. The MB'06 mission was structured as a set of mission modes, where transition between modes depended on sensed events, comms messages, and default transitions. This style has persisted to the present day.
The introduction of the adaptive autonomy mission structure in MB'06 was not without contention. At the time it was perceived as risky. The time and cost of the UUV and its towed sensor array at MB'06 were substantial, and involved several research groups. Fortunately, the chief scientist on the ship was Prof. Schmidt who had the final say. The roughly two years of testing through simulation and on the autonomous kayaks gave the science team the confidence to debut the new autonomy structure on a high-profile exercise.
The Clearpath Kingfisher M100s (Early 2010s)
Throughout the 2000's, the MOOS-IvP autonomy project was primarily funded by ONR Code 31, and field-tested on a number of large ONR Code 32 projects such as GOATS and PLUSNet. In 2011, Battelle began a multi-year grant to MIT to leverage the MOOS-IvP project to create a new MIT class in Marine Autonomy. A goal of this class was to provide students with the ability to write autonomy software of their own and field-test their work on marine vehicles on the MIT campus. At this point the SCOUT autonomous kayaks were nearly a decade old. Robotic Marine Systems (Joseph Curcio), the maker of the SCOUT platforms, was deeply involved as the chief scientist of Juliet Marine, focused on a completely different vessel. MIT needed another solution for providing low-cost marine robots in time for the first class of MIT 2.680, Marine Autonomy, Sensing and Communications, beginning in February of 2012.
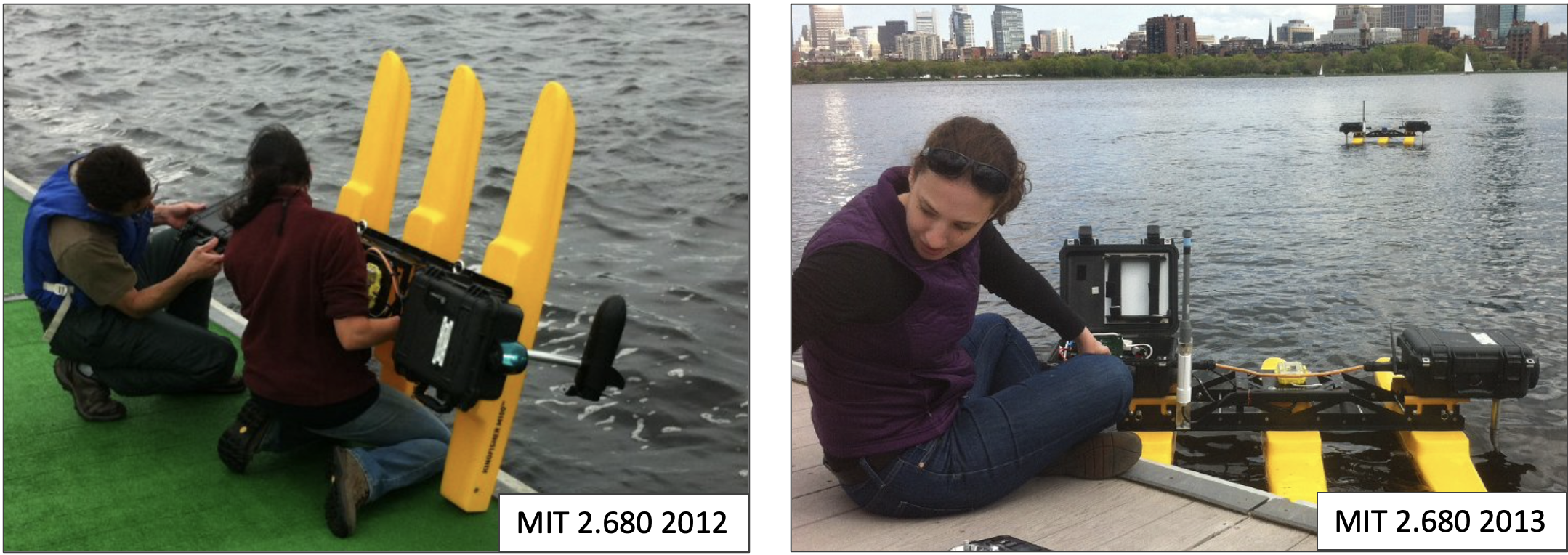
Figure 4.1: The Clearpath Robotics Kingfisher M100 USV used a custom trimaran hull and frame, with Pelican case electronics boxes on both the port and starboard sides. A pair of differencial thrust trolling motors was mounted on each side. It contained a single computer with Clearpath software (and eventually MIT software), with a WiFi connection and RC control for launch and recovery. (On the left: Alon Yaari, PhD student Stephanie Petillo. On the right: PhD student Erin Fischell.)
The Kingfisher USVs were the primary teaching and research platforms for Marine Autonomy from 2012-2014. MIT eventually purchased four units. One drawback to the M100s (and same for the kayaks) was that the thruster propellers extended well below the waterline and were not movable. This meant that, for each Kingfisher, the lab needed also to own a dedicated cart for storing and moving the vehicle. The next version of the Kingfisher solved this problem nicely.
The Clearpath Kingfisher M200s (Mid 2010s)
The Kingfisher M200 was a complete re-design from the M100. It contained dual collapsable pontoons, and used water jet propulsion instead of trolling motors. The switch to water jet provided a couple advantages. First, it allowed the vehicles to be safely placed directly on the dock, eliminating the need to have a cart or stand for each vehicle. Lab space is precious and this was a huge advantage. The second advantage was safety. Although the spinning propellers were never really regarded as a danger, the major project in the lab from about 2015 through 2019 was the Aquaticus project (www.aquaticus.org). This project involved humans in motorized kayaks, co-deployed with the robots. All experiments required human-subject approval, and the elimination of the spinning props was helpful. The downside or the waterjet propulsion is that reverse propulsion was only about 1/10th as effective which made the turning speed slower than the M100s. Overall the M200 was a substantial improvement over the M100.
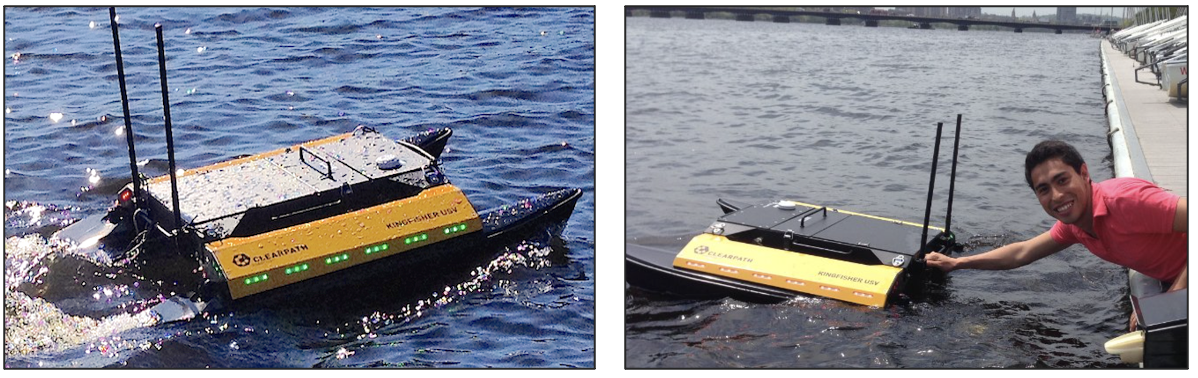
Figure 5.1: The Clearpath Robotics Kingfisher M200 USV used custom-made pontoons and hull frame. From front to back it contained three sections. The main computer section, the battery section and the payload section. The payload section was empty, but had removable plates to access the water below. The MIT lab began using the payload section to hold a separate payload computer and power supply for the payload computer. The Clearpath computer provided an external connector to the payload section and the payload computer. Batteries were removable recharged externally. Our lab typically had two batteries per vehicle. (On the right: Arturo Parrales.)
The M200 came with one other important advantage. It contained a separate payload section, and Clearpath supported a version of the payload autonomy interface. This interface was implemented in the style of NMEA text strings over a serial port. The Clearpath interface was modeled after the Bluefin payload autonomy interface developed for the MB'06 exercised discussed above. While the payload computer was in a separate pressure sphere within the Bluefin UUV, the payload computer on the Kingfisher was on a Raspberry Pi computer inside a water-tight box. This computer box is known as a PABLO at MIT and is in its fourth generation configuration. The first generations were designed to work with the M200. The primary advantage of a separate and removable payload autonomy computer was that different users, e.g., student teams, could prepare their mission on their own PABLO and insert the PABLO unit into any working M200. In the case of the M100, students had to integrate their software onto a particular M100 which creates scheduling conflicts when there are more users than robots. Even with more robots than users, it meant that if one vehicle were experiencing a mechanical problem, a user would need to re-install their software onto another robot which can be time-consuming. The swappable payload autonomy computer of the M200 was a very valuable feature indeed!
One drawback of the M200 design was that the computer section was essentially inseperable from the vehicle body. MIT owned four M200s, and as vehicles wear down, it was common to have a disabled vehicle due to a computer problem, or due to a thruster problem. It was not possible to swap components to create a working vehicle in a pinch. The M300, coming next, solved this problem.
The Clearpath Heron M300s (Late 2010s, Early 2020s)
In 2016, Clearpath began offering an improved version of the Kingfisher, the M300. Due to a name clash with another vendor, Clearpath also decided to change the name of the vehicle from Kingfisher to Heron. In 2016 our lab was heavily invested in a DARPA funded project called Aquaticus. A decision was made to upgrade the four existing Kingfishers to the M300 configuration and purchase two additional Herons. The Aquaticus project required fielding four Herons simultaneously. Aquaticus event days involved substantial resources in people and equipment, so our lab decided that a six vehicle inventory was required.
Although the payload section remained largly unchanged in size in location, everything in front changed. The computer section is essentially a tray that bolts into the frame. The battery sits in the tray completely obscuring the computer section underneath. The removable computer section was a huge improvement over the M200 because it allowed a computer section to be swapped between vehicle frames.
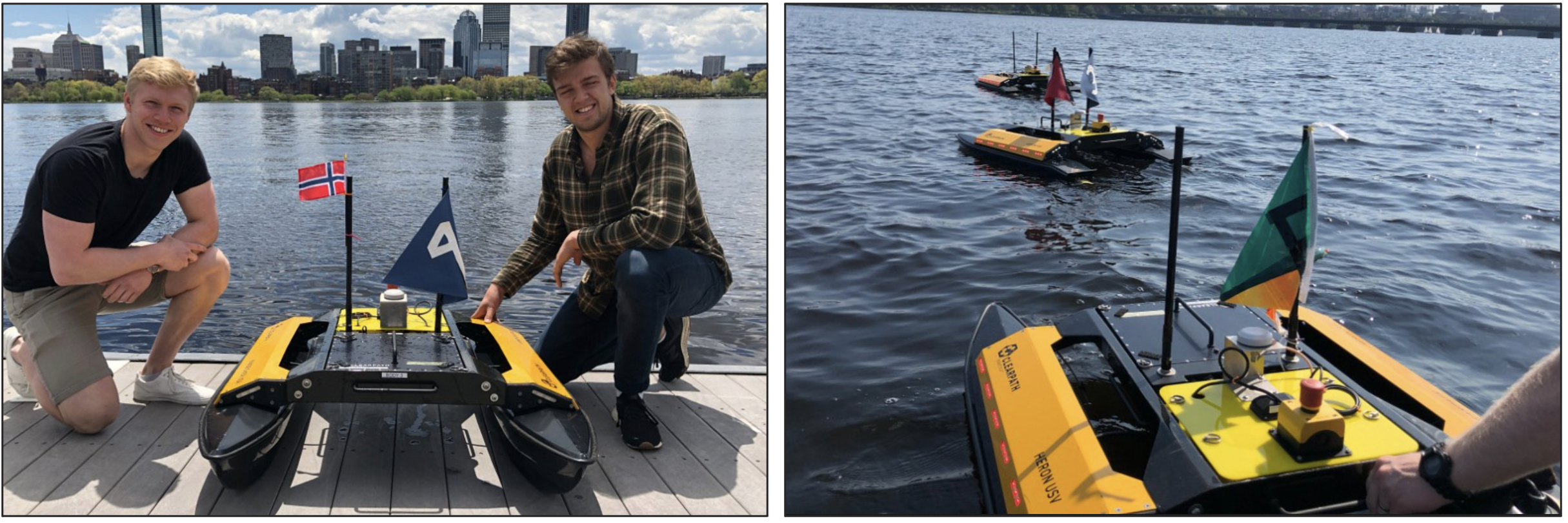
Figure 6.1: The Clearpath Robotics Heron M300 USV, similar to the M200, used custom-made pontoons and hull frame. The M300 computer section is removable however, and can be seamlessly swapped between vehicle bodies. Clearpath supported an "MIT variant" which included and E-stop button. MIT also created its own payload cover with mounts for the GPS receiver and IMU. (On the left, Simen Overeng, Oliver Os, Norwegian visiting students, Spring 2019.)
With the M300, MIT requested that Clearpath support a variant that includes an E-Stop button. This was primarily advocated for by Dr. Michael (Misha) Novitzky, an MIT post-doc managing the Aquaticus project. The Herons were to be involved in human-robot experiments and the E-Stop was sensible safety feature. In retrospect it is a good idea for all vehicles regardless of experiment.
The payload section of the Herons also evolved quite a bit from 2016-2019. In addition to Misha's additions and fixes to the Herons, Dr. Paul Robinette, and Caileigh Fitzgerald also created both a payload section tray, and payload cover shown in the above figure. The Payload autonomy box (PABLO) was further modified in terms of the connector layout, and separate payload computer battery box and connnector was also improved. These modifications continue to be essential features of the robots to the present day. While the E-Stop is a modification supported by Clearpath, the payload autonomy box, battery box, and mounting tray, and cover, are all MIT in-house mods worked out by Misha, Paul and Caileigh.
A minor note: the ability to switch computer boxes between vehicle frames is a major advantage, especially as vehicles age and begin to wear down. However, it does create a philosophical debate on whether the name/identity of the vehicle is determined by the computer box, or the vehicle body. While the body is bigger, the user interacts with the computer. Over time it seems the computer has won this battle. We tend to name our vehicles, and the name follows the computer box.
The Clearpath Heron M400s (Early 2020s)
The M400 contains a number of funtional improvements over the M300, primarily focused on the computer box, the battery, and their interface. Early M300 units occasionally had issues with water integrity and corrosion around the battery terminals. While these issues were largely resolved, a more robust fix was engineered by Clearpath and offered in 2020. At the time of this writing MIT is expecting six new computer boxes and six new batteries in the Spring of 2022.
Present-Day Bluefin-21 UUV
In the 20+ year timeline discussed here, the Bluefin-21 UUV has remained the crown jewel of our lab, participating in many ONR and DARPA funded projects. It has also evolved its sensing, navigation, and on board computing capabilities substantially. It has been fielded with nose-mounted arrays, and multiple types of towed sensors. It most recently was deployed at ICEX 2020 in the Arctic, and in ICEX 2016. The under-ice missions are further notable in that hardware or software faults that may normally result in an all-stop and surfacing, cannot be tolerated under the ice.
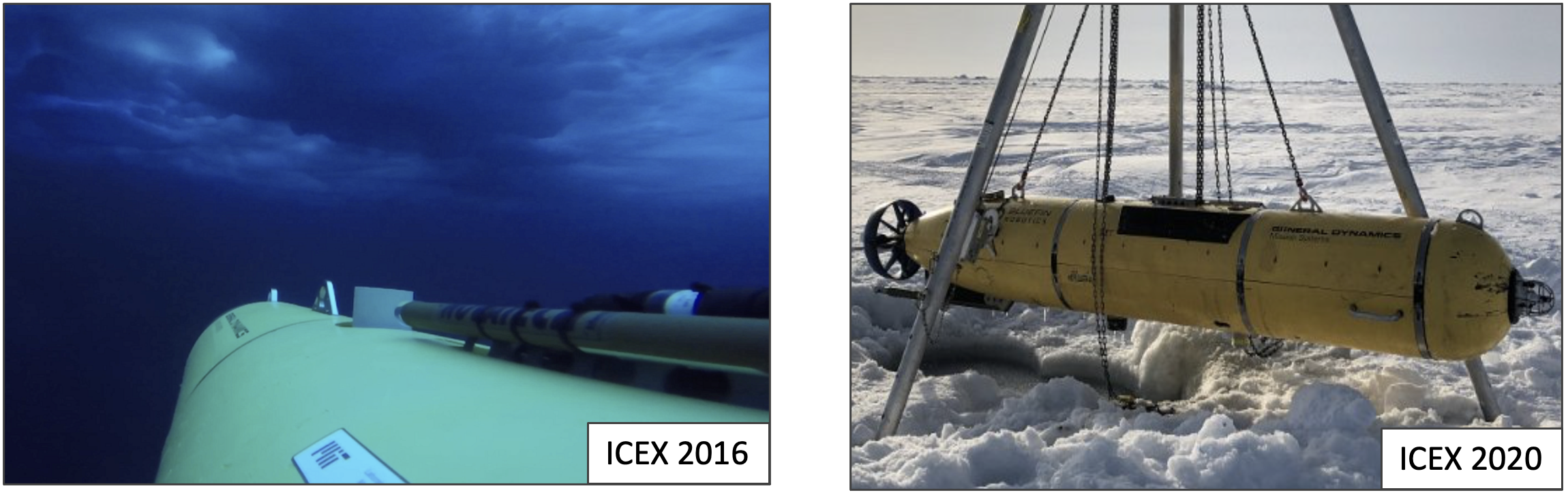
Figure 8.1: The Bluefin 21-inch UUV have in recent years been primarily used for participation the Navy's ICEX experiments in the Arctic.
Each successive deployment over the last decade has attempted increasingly complex missions in terms of autonomy, sensing, communication and navigation. Nearly every member of our lab working with the Bluefin UUV has take MIT 2.680 Autonomy, Sensing and Communication, and experienced early in-water deployments with one of the low-cost surface craft described above.
References
- Joseph Curcio, John Leonard, Andrew Patrikalakis, SCOUT - A Low Cost Autonomous Surface Platform for Research in Cooperative Autonomy, OCEANS 2005, Washington DC, September, 2005. (bibtex)
- Michael R. Benjamin, Joe Curcio, COLREGS-Based Navigation in Unmanned Marine Vehicles, AUV-2004, Sebasco Harbor, Maine, June, 2004. (bibtex)
- Michael Benjamin, Michael Novitzky, Paul Robinette, Henrik Schmidt, The Aquaticus Human-Robot Teaming Testbed, http://www.aquaticus.org, (bibtex)
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF