Vehicles

Software Trees
Equipment
- Servicing the Heron
- Configure New Heron
- GPS Config Solution
- Heron Batteries
- PABLO
- GPS/E-Stop Equip
- Known Issues
- Imu Calibration Tips
- Repair and parts
Network
Attic
M300 EVK-M8 Configuration for GPS Heading Accuracy
Without additional GPS configuration, the Heron M400 Heron cannot receive sufficiently accurate GPS heading data to run autonomous missions. This can be fixed by accessing the EVK-M8 GPS configuration settings in u-center (u-blox GNSS evaluation software).
Accessing EVK-M8: M300 Heron Computer Box Assembly & Disassembly
In order to access the USB port of the EVK-M8, you must disassemble the M300 Heron Computer Box. Please note that this is a risky procedure, and it must be done with caution. Review our Servicing the Heron page for tips on good practice (over/under tightening & star-shaped pattern for tightening screws). In addition, make sure the blue waterproof seal is completely clear of debris before resealing the computer box. Finally, reference any available documentation from Clearpath Robotics.
Please contact mikerb@mit.edu or Clearpath if you are unsure or have any questions.
Downloading and Running u-center
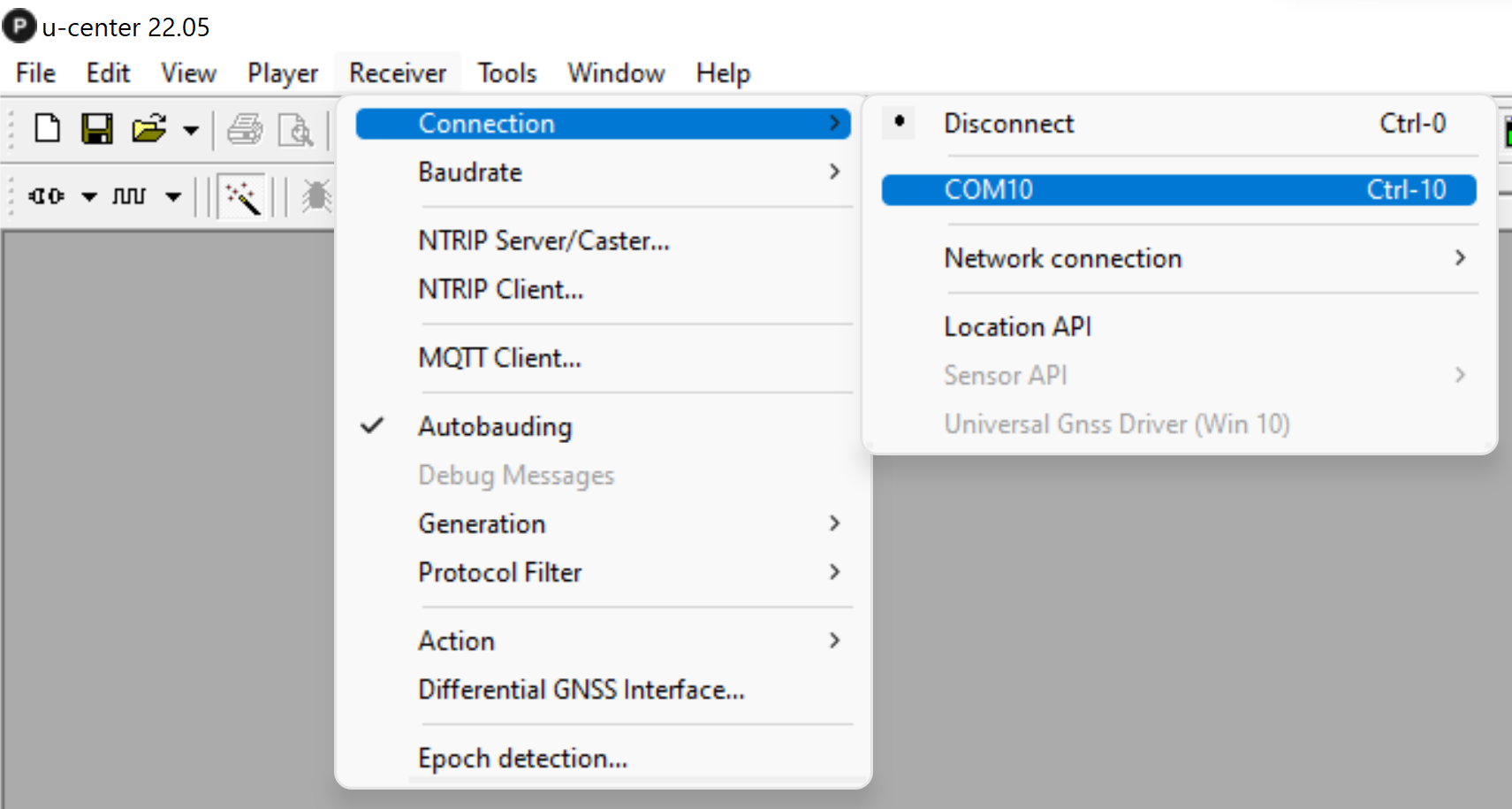
u-center is the software used to change the configuration of your GPS device, and it runs only on Windows. For the EVK-M8, download u-center v22.05. Once u-center is installed and running, connect your computer to the EVK-M8 through micro USB. In the menu bar, select Receiver->Connection and then select the correct serial port.
Kalman Filter Configuration (Solution)
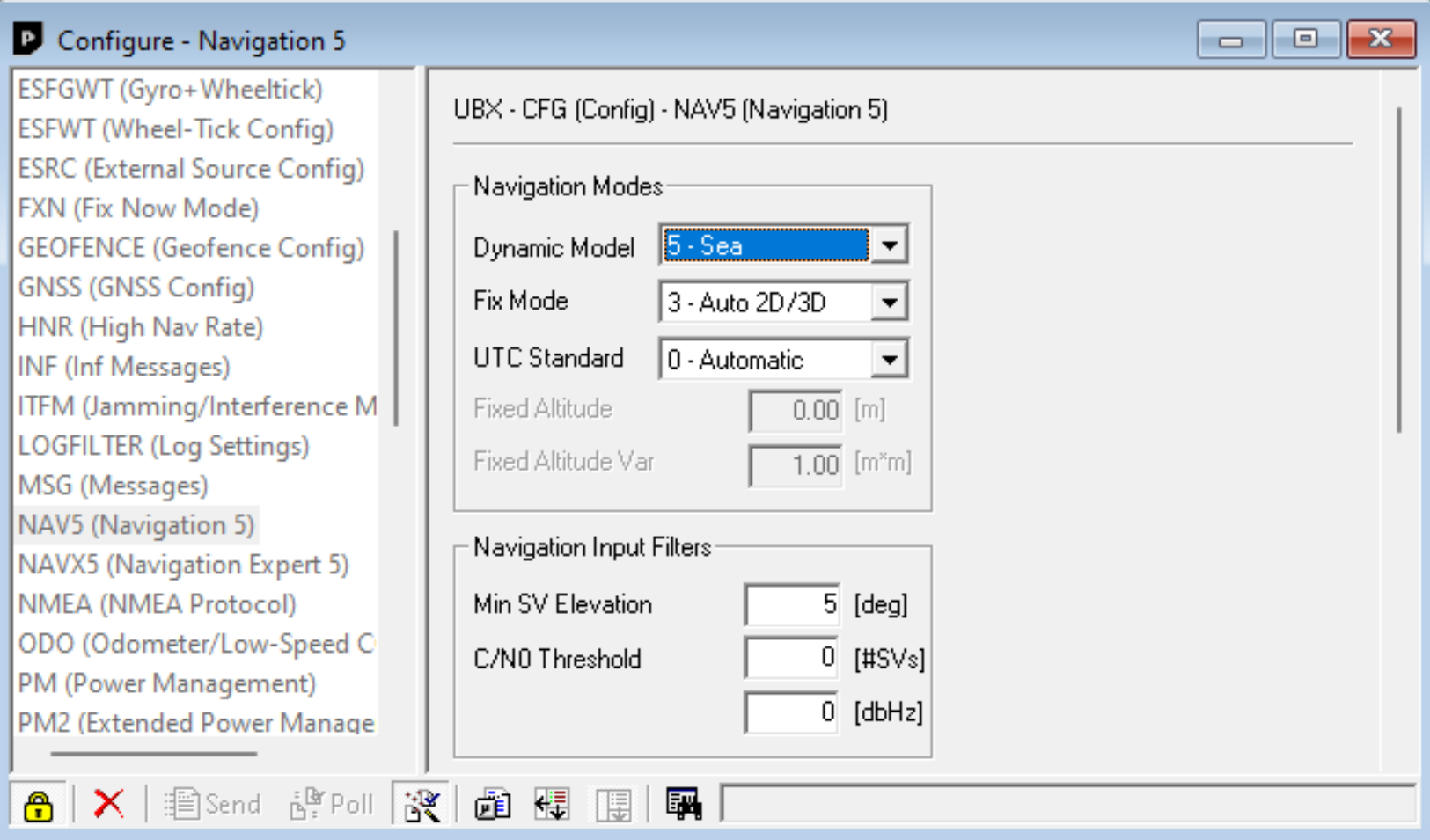
Enter the configuration view by selecting (in the menu bar) “View”->”Configuration View”. In the list of settings that appears, select “Nav5 (Navigation 5)”.
Once you have accessed the Nav5 settings, change the “Dynamic Model“ from its current state to “5 - Sea”. This will modify the navigation engine’s assumptions/interpretations of the platform and application environment. More information can be found in u-center’s documentation. Finally, select “Send” (found in the bottom of the configuration view window) for the changes to take effect.
Additional Settings
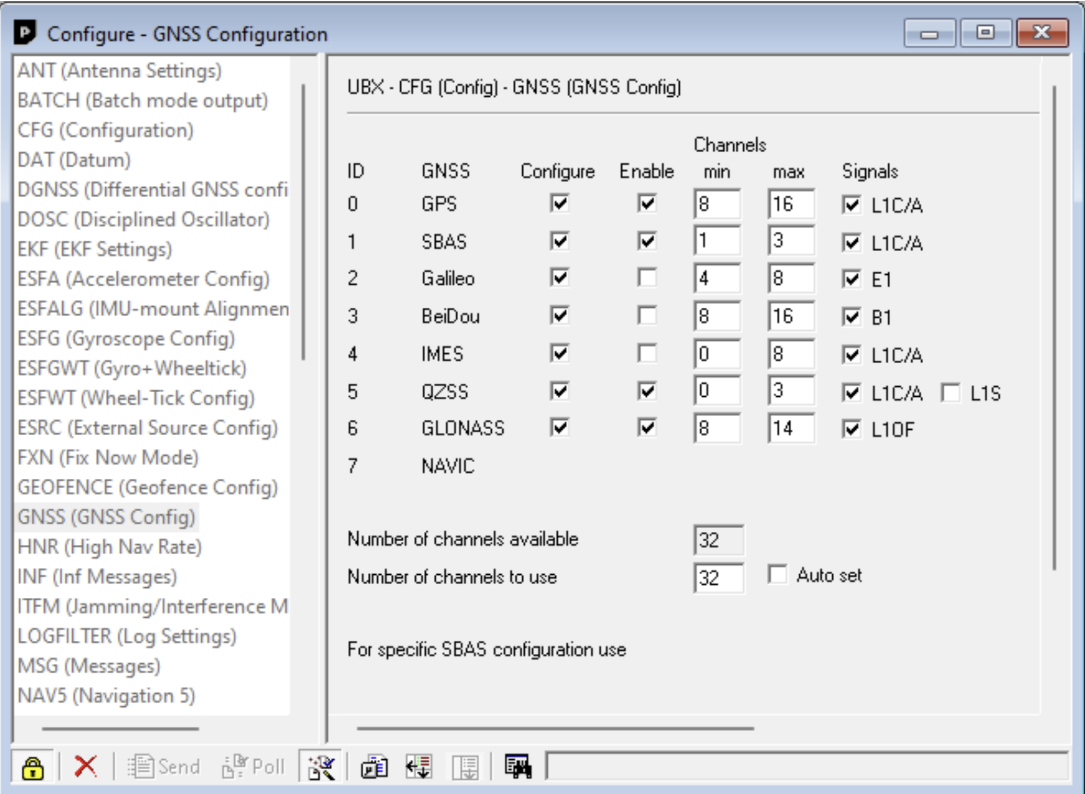
For additional accuracy, you can enable SBAS (Satellite-Based Augmentation System) for differential GPS corrections. SBAS will provide an incremental improvement in accuracy.
To enable SBAS enter the configuration view and select “GNSS Config”. Check the boxes for “Configure” and “Enable” in the SBAS row. Select “Send” for the changes to take effect. SBAS can be further configured (if needed) by scrolling down and selecting “SBAS (SBAS Settings)” from the setting menu on the left of the display.
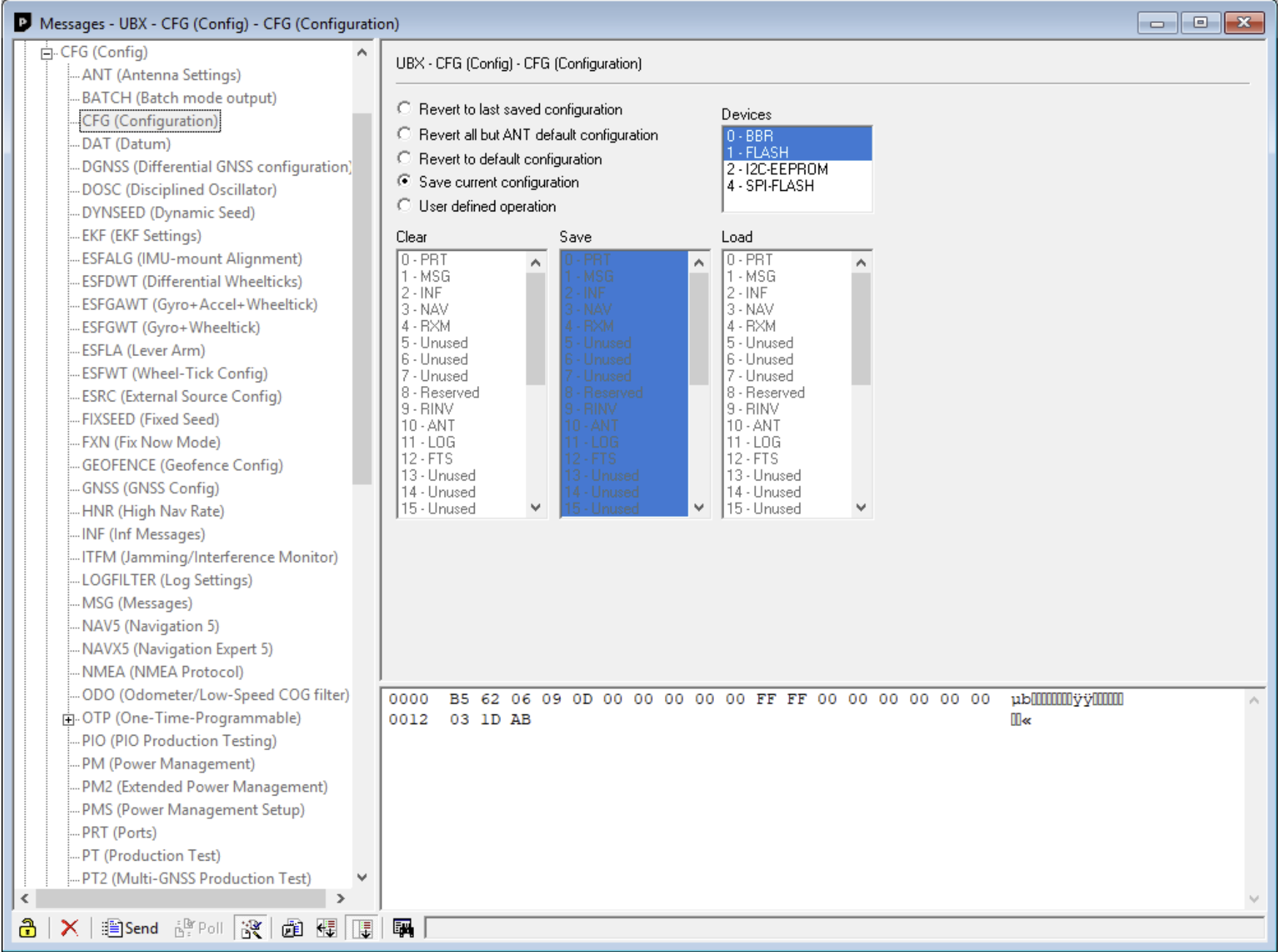
Saving to Stable Memory
If you do not explicitly save the changes to stable memory, they will be wiped when the EVK-M8 restarts.
In the same configuration view, select “CFG (Configuration)”, and select “Save current configuration”. Finally, select “Send “for the changes to take effect.
To verify that the changes took effect before sealing the computer box, unplug the EVK-M8, wait for a moment, close u-center, then reconnect the USB. Go through the above settings to u-center and make sure each is still in effect.
Troubleshooting in u-center
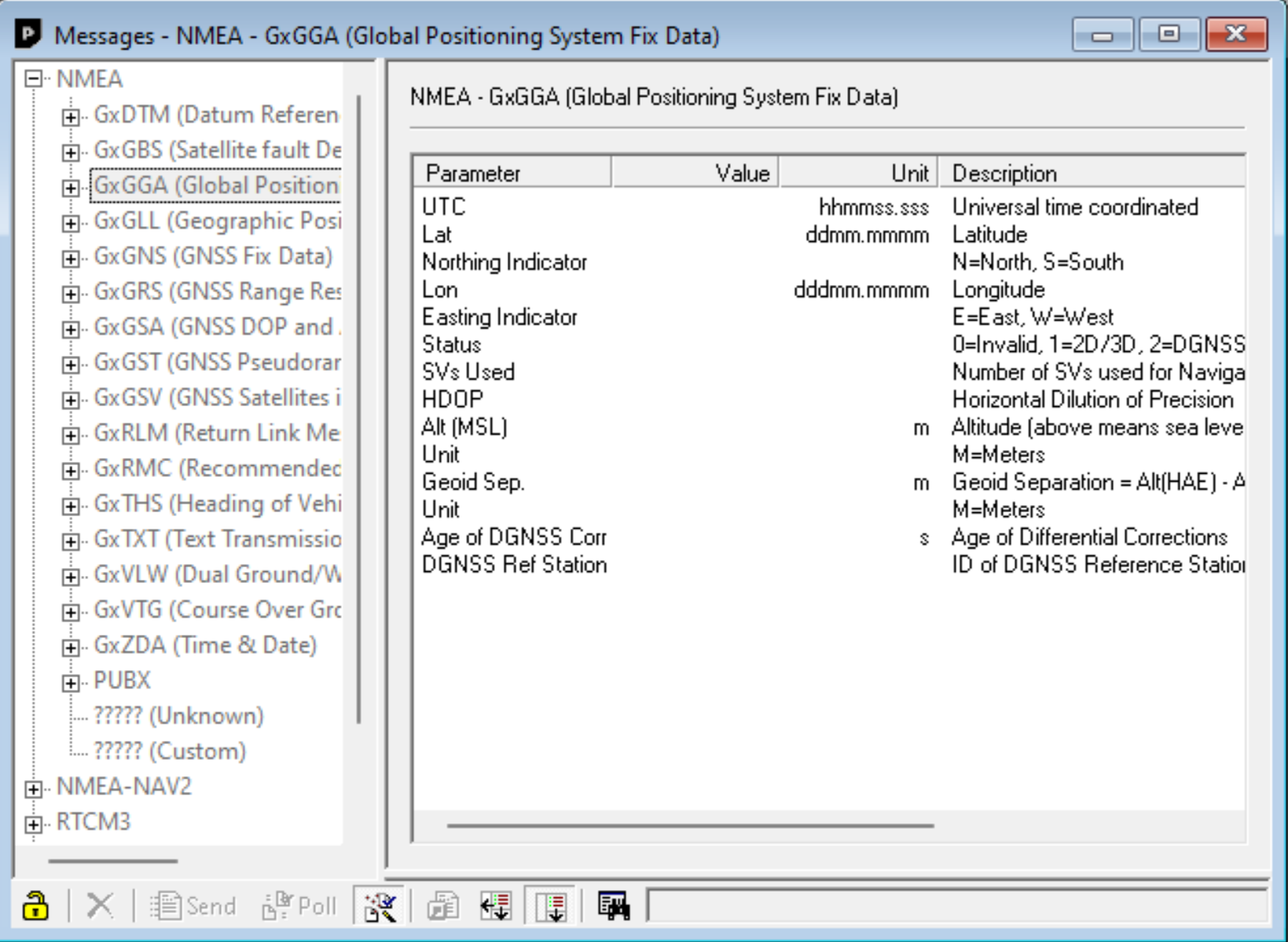
u-center can be used to easily view the output of an attached GPS device, allowing you to troubleshoot and verify changes. To view the GPS output, select "View"->"Messages View". Then in the window that appears, expand "NMEA" and select "GxGGA (Global Positioning System Fix Data)".
From there you can view the Latitude ("Lat") and Longitude ("Lon"). Furthermore, if you view the "Status" (below the "Easting Indicator"), you can confirm SBAS (DGNSS is differential GNSS received through SBAS). If you see a status of 2 (as opposed to 0 or 1), you are receiving DGNSS.
To quantify accuracy, you can view the PDOP, HDOP, VDOP (positional, horizontal, and vertical dilution of position) by selecting "GxGSA (GNSS DOP and Active Satellites)" instead of GxGGA in the above step.