Prev-Talk | Next-Talk | All-Talks | Talks-Sorted | MOOS-DAWG'19
Talk-04: Integrating MOOS into a Complex UMAA-Compliant Vehicle
Speaker: Brian Donlan, Huntington Ingalls Industries � Technical Solutions
Josh Hill, and Michael Hennessy, Huntington Ingalls Industries � Technical Solutions
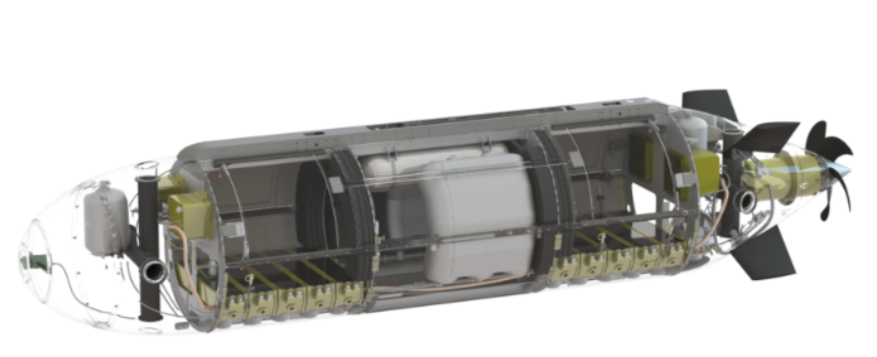
Proteus is a large diameter autonomous underwater vehicle which contains an array of complex vehicle systems. Proteus provides an autonomous platform capable of testing sensors, autonomy, payloads, energy storage systems, and other technologies that might find their way into LDUUV or XLUUV.
Huntington Ingalls Industries (HII) is upgrading its existing Proteus large diameter UUV to an open source autonomy system (MOOS) and an Unmanned Maritime Autonomy Architecture (UMAA) compliant Vehicle Control System. The new system is replacing an existing proprietary autonomy and Vehicle Control System.

Other vehicle enhancements include:
- Improved health monitoring systems
- New electronics canister
- New Forward looking sonar
Complex vehicle control systems
The Proteus vehicle is designed to support a wide array of autonomous and manned mission types. As a result, the vehicle contains a number of complex vehicle systems including:
- Four tail fins plus bow planes
- Large main thruster
- Four positioning thrusters*
- Complex power management system
- Li battery system
- Variable ballast system
- Open ballast
- Closed ballast
- Forward/aft trim system
- Dual retractable masts
- On-board systems
- GPS, INS, DVL, SVS
- On-board communication systems
Payload System
Proteus has been used to launch and deploy a large assortment of sensors and smaller UUVs using its bomb bay and side launching rails. To accomplish this, Proteus is often retrofitted with additional payload managers and autonomy controllers. MOOS has been used as a supplemental autonomy controller for a number of test missions.

MOOS Enhancements
To support advanced autonomy testing, the MOOS system will primarily be enhanced in the two areas of Heath Management and Situational Awareness.
Heath Management
The need for a Health Controller may not be obvious at first, but due to the large number of complex vehicle systems in the Proteus porting, the complexity to autonomously maintain vehicle health becomes abundantly clear. HII is adding to the MOOS software system architectures to address this issue. This is being done by introducing a MOOS-IvP Health Controller that:
- Maintains UMAA compliance for modularity
- Alleviates system complexity of other controllers
- Handles non-basic �health� functionality
This will be accomplished by transferring some of the error handling responsibilities from each of the vehicle system handlers to the Health Controller. Basic health maintenance, such as hardware and/or software error generation and handling specific to a vehicle system handler can be managed internally by the specific handler, but the more advanced problems will be handled by the health controller.
To maintain UMAA modularity requirements, all of the errors that may potentially occur in a specific vehicle system fall into one of three classifications�Communication Errors, Data Errors, Command Errors. Errors will be classified as stemming from one of four causes:
- Bad Configuration(s) � Absence
- Interruption
- Out-of-Tolerance
Using this abstraction technique, each vehicle system categorizes and abstracts errors before reporting them to the Health Controller for solution. To alleviate system complexity, each vehicle system (Engineering, Maneuver, Payload, etc.) will have a Communication Executive that is responsible for handling internal Communication Errors, as well as reporting said errors to the Health Controller. Additionally, each vehicle system has a Command Executive that is responsible for handling Command Errors, as well as reporting them to the Health Controller. Lastly, all Data Errors in each vehicle system are used to generate performance reports for its respective system; these reports are sent to the Health Controller for advanced processing. Using the performance reports provided by each vehicle system, the Health Controller handles all non- basic �health� functionality, such as Mission Re-planning, Energy Management, and Path Re-planning.
The Health Controller follows a four-step procedure to update and maintain the vehicle state: Diagnose, Prognoses, Analyze, and Resolve. In addition, to the performance reports received from each vehicle system, the Health Controller monitors the errors reported by each system�s Command Executive and Communications Executive for errors that cannot be resolved by the reporting system. If one such error exists, then the Health Controller diagnoses it and reports the diagnosis (What happened? Where did it happen?) to another function of the Health Controller that generates a prognosis (What is the effect of this?). Once a prognosis is made, it and the diagnosis are sent to a Mission Re-planner, where a list of viable solutions is produced. This list is forwarded to a Solution Optimizer that analyzes each candidate, ultimately selecting the optimal solution. This solution is sent back to another faction of the Health Controller to be implemented, resolving the initial diagnosis.
Situational Awareness
The MOOS situational awareness capability will be enhanced for support more complex missions. Initially this will include obstacle avoidance using a high resolution forward-looking sonar system. Further enhancements include working in conjunction with the proposed Health Controller and its Mission Re- planner. To re-plan a mission, Situational Awareness will be used to provide:
- an assessment of environment effects (weather-induced motion, currents, added drag)
- an assessment of threats (active & passive detection, as well as surface expression)
- an assessment of spatial constraints (charts, geopolitical, shipping lanes, fishing areas)
Vehicle Control System
The Proteus Vehicle control system is being totally redesigned with the intent to be UMAA compliant. The Vehicle Control System is made up of a large assortment of Device Handler and managers. The new vehicle control system interfaces to MOOS via a UMAA-compliant Front Seat interface. Proteus is being upgraded with a new main electrical canister that contains two i7 processors (autonomy processor/vehicle processor).
Categories:
- UUVs
- Interoperability