Welcome to MOOS-DAWG 2019 !!
The 2019 Working Group Meeting for MOOS and IvP developers and practitioners was held in Cambridge Massachusetts, August 7-8 2019, on the campus of the Massachusetts Institute of Technology.
See Photo Album from MOOS-DAWG 2019
MOOS-DAWG Workshop Format: The meeting consists of single-track discussions on:
- Fielded autonomous platforms using MOOS and/or MOOS-IvP.
- Development of MOOS-based software applications.
- Panel discussions on best-practices and roadmaps for improvement.
Participants 2019 Demo Day
 https://sea-machines.com Waypoint Following Survey Autonomy Collision Avoidance | Sea Machines Robotics is a forward-looking, autonomous technology company that specializes in advanced control technology for workboats and other commercial surface vessels. The SMR flagship product is the SM300 vessel intelligence system which provides �operator-in-the loop� autonomous command and control, plus direct remote-control operation via wireless belt pack. Sea Machines will demonstrate the SM300 by remotely executing an autonomous mission in Dorchester Bay using Steadfast, one of Sea Machines� test vessels. Missions will be planned and monitored from the MIT Sailing Pavilion and demonstrate the capabilities of the system. Following the autonomous demo the Steadfast will sail to the Charles and be available for tours and a beltpack remote control demonstration.� Talk 34 |
 https://www.baesystems.com | BAE Systems' Riptide UUV: The Riptide UUV is a highly flexible, open source autonomous undersea vehicle that provides users a state-of-the-art, low cost development solution ideally suited for developers of autonomy and behaviors, power systems, subsea sensors, and new payloads. The micro-UUV features open hardware and software interfaces to provide users a reliable and robust platform to advance technology development. The vehicle design is optimized for high efficiency with the best hydrodynamic signature in its class. Talk 33 |
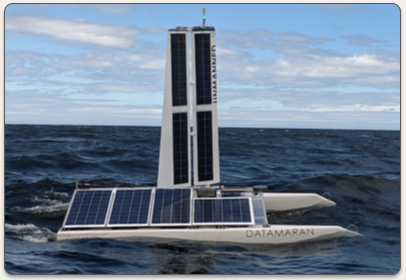 https://www.automarinesys.com | Datamaran, Autonomous Marine Systems: Autonomous Marine Systems Inc. designs, builds, and operates autonomous sailing vessels in Somerville MA. The craft are power positive and can operate in open water for months on end with no intervention. The unique design of DATAMARANs affords SWAP capabilities and accommodates payloads comparable to powered vessels with the endurance of gliders. Two models are commercially available, and are servicing customers in the energy, defense and research communities.�Talk 28 |
 https://seagrant.mit.edu http://www.brunswick.com | The AUV Lab at MIT Sea Grant and the Brunswick Corporation have collaborated to integrate MOOS-IvP on the Boston Whaler R/V Philos. This integration allows Philos to utilize built-in MOOS apps and IvP behaviors like obstacle avoidance, COLREGS, and survey patterns. A selection of these behaviors will be demonstrated. Multi-vehicle behaviors will also be demonstrated with the AUV Lab vehicle Remote Explorer (REx) 4. Philos is on loan to the AUV Lab from Brunswick for research and support purposes.�Talk 23 |
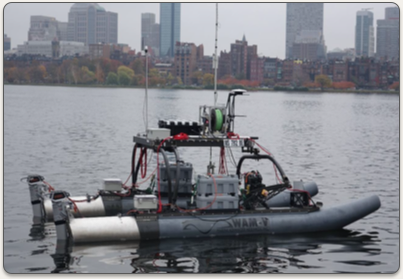 https://seagrant.mit.edu | The AUV Lab at MIT Sea Grant will demonstrate new features of the Remote Explorer (REx) 4 autonomous surface vehicle. REx 4 started as a WAM-V for the 2014 RobotX Competition. For the past five years, the AUV Lab has been improving the vessel to increase its utility as an ocean science data gathering platform as well as improving its autonomy. This year, we will demonstrate obstacle avoidance and collision avoidance while performing a waypoint or survey mission.�Talk 22 |
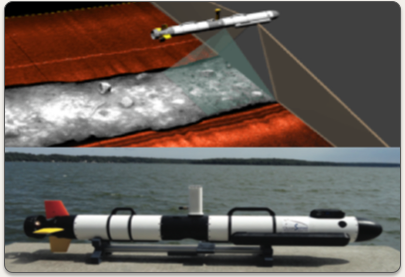 https://ocean-server.com youtube.com/watch?v=5wAPjKyG4kA | The Iver3 AUV: is the latest affordable AUV platform released by L3 OceanServer. This autonomous system benefits from 14 years of experience in building reliable systems with well over 250 AUVs shipped. The OceanServer Remote Helm on the Iver3 AUV provides a fully functional and open system where the users can install their hardware and make software extensions to the vehicle without the requirement of a custom design. At 2019 Demo Day the Iver simulation and mission planning tools will be demonstrated. Talk 06 |
 http://lamss.mit.edu http://seagrant.mit.edu | The Laboratory for Autonomous Marine Sensing Systems and the AUV Lab at MIT Sea Grant have collaborated to integrate a BlueROV2 on the REx4 platform. This combination of above-water and underwater systems allows for fast travel to interesting underwater sites, quick deployment of the underwater component, and then reliable communication with the ROV for scientific and sensing purposes. REx 4 is now capable of deploying an integrated BlueROV2 system, which can be manually controlled by a remotely stationed human operator or the BlueROV2 can be operated in an autonomous mode according to MOOS-based commands given by REx 4. We will demonstrate these features at MOOS-DAWG. |
 | Marine Robotics, LLC: We will present on the basic capability of mass producible autonomously sailing robotic boats that employ MOOS-IvP. We have been developing this technology to service the tide-water bays and rivers in regions like the mid-Atlantic USA. Typical of this tidewater environment is shallow, (typically 1 to 3-foot depth) saline water. It is typically polluted, exhausted and highly trafficked. Low cost (autonomous) marine observation greatly aids the communities and industry by providing real-time measurements of pH, depth, wind, oxygen, nitrogen, current and temperature. Talk 24 |
 https://www.ll.mit.edu | MIT Lincoln Laboratory: Ionobot: is an autonomous mobile water platform, designed by MIT students with assistance from MIT Lincoln Lab and MIT faculty, that is capable of navigating to user-specified coordinates at sea and stay for between three to six months. The Ionobot is equipped with a payload that measures the strength of the ionosphere. This data will be used to correct for errors created by ionospheric distortion of GPS signals. Talk 08 |
 https://www.nctu.edu.tw/en https://robotx-nctu.github.io/duckiepond | National Chiao Tung University: Duckiepond is an education and research environment that includes development software, education materials, and a fleet of autonomous surface vehicles Duckieboat. The Duckieboat is built from low-cost 3D printed or commercially available parts, and includes a monocular camera, IMU, GPS, and onboard low-powered embedded computers (Nvidia Jetson and Raspberry Pi) that run machine learning (ML) tools. Propulsion is configurable with 2-4 thrusters. Communication between shore-side and the Duckieboat is using wifi with range up to 100 meters, or longer range with other low-bandwidth solutions. The Duckiepond environment provides autonomy education materials for maritime missions, such as track and trail, navigation. All software, hardware, and education materials are openly available here. Talk 25 |
 | Clearpath Heron USVs with MIT Payload Autonomy: The Heron USV is a 1-2 person portable vehicle made by Clearpath Robotics. This vehicle is used at MIT for research on COLREGS collision avoidance, and in the DARPA/ONR funded human robot competition called Aquaticus. It is also the primary teaching platform for new students. The MIT Herons are a variant of the standard-issued platform, with autonomy run from a separate payload computer. These variants and the payload autonomy will be demonstrated. http://www.clearpathrobotics.com/heron |
Some Workshop topic areas:
- MOOS middleware: Issues related to MOOSDB performance and the interface of MOOS applications.
- IvP Helm: Application experiences, behavior development.
- Payload (backseat driver) interface: standards, best practices, source code availability.
- Acoustic communications: Applications for interfacing with acoustic modems and defining and handling message sets.
- MOOS on low-powered CPUs: Experiences in porting MOOS to the Gumstix, ARM9, or similar processor families.
- Mission planning / Mission configuration: Tools for composing, visualizing or automated error checking of mission (or helm behavior) configuration files.
- Simulation: Includes simulation of the platform, inter-node communications, and models of the ocean or environment.
- Quality Control: Issues related to process of adopting and accepting testing new software releases.
- MOOS/MOOS-IvP build system: Issues related to maintaining a build system for third-party software using MOOS or MOOS-IvP trees.
- Mission monitoring: Tools for rendering vehicle operations and tools for scoping on the MOOSDB.
- Post mission analysis: Tools for parsing, editing and analyzing mission log files.