The MB06 Cruise
Location:
Monterey Bay, CA
Period:
Oct. 2006
Partners:
ARL Penn State
APL-UW
MPL Scripps
Bluefin Robotics
SAIC
WHOI
Objectives:
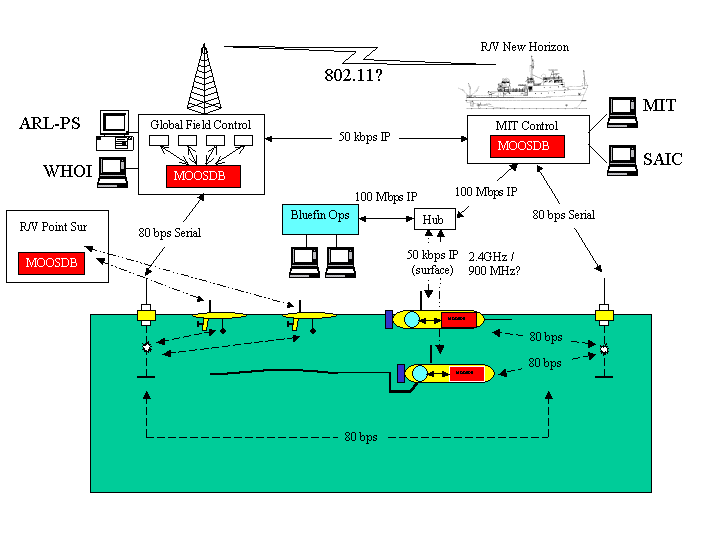
The objective of MB06 was to demonstrate the capabilities of autonomous veicles towing acoustic arrays for littoral surveillance, and the associated communication, command and control infrastructure, including MOOS-IvP platform autonomy.
LAMSS Contributions
MB06 provided the first field demonstration of the MOOS-IvP payload autonomy architecture. The experiment demonstrated the robustness of this autonomy architecture for control of the LAMSS BF21 AUVs Unicorn and Macrura with towed arrays. The MemoryTurn behavior for avoiding damage to the towed array during turns was demonstrated very effectively.
Using the LAMSS Scout ASCs, the experiment also demonstrated the capabilities for MOOS-IvP autonomy in performing collaborative missions, and the use of ASC as effective communication gateways.