The Hazard Search Autonomy Challenge Problem
A new component of MOOS-DAWG'13 is the introduction of an autonomy competition. We plan to make this event a recurring part of these workshops, altering the nature of the competition each year. Entries are purely software in nature, with initial competitions occurring solely in simulation. Top finishers may have their solutions run on MIT-provided marine vehicle hardware on the Charles River at MOOS-DAWG'13. All necessary simulation software and documentation are provided to allow as many participants from different backgrounds to participate. No prior experience with MOOS or MOOS-IvP required! The software should work on any Mac or GNU/Linux platform. There is limited support for Windows users.
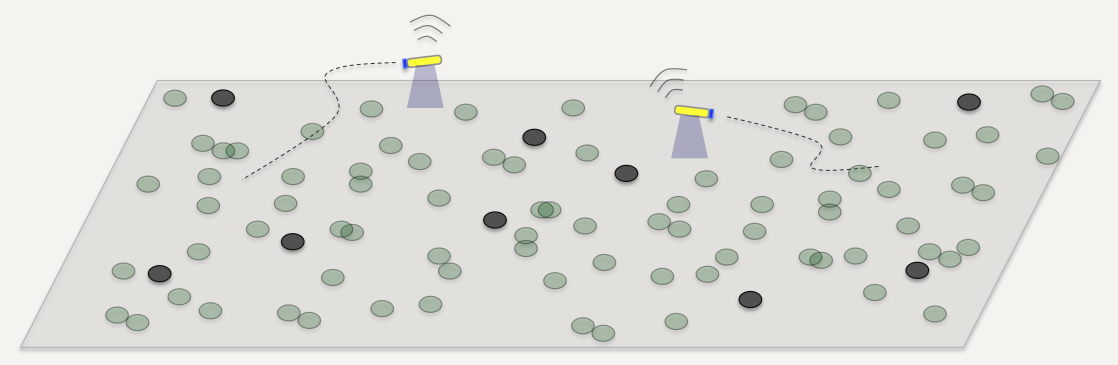
The hazard search challenge problem focusses on the use of collaborative and adaptive autonomy to maneuver a pair of marine vehicles to search a given area for hazardous objects. Each vehicle is equipped with a hazard sensor capable of detecting hazardous objects and further discerning the hazardous objects from benign objects, e.g. rocks. The goal is to search the given region within the given time constraints, and produce report as accurate as possible. The score is based on minimizing penalties for missed hazards and penalties for false alarms. The search strategy, sensor management and inter-vehicle communications strategy is up to the participants.
Givens:
- A given search region and set of objects of undisclosed type and location.
- A pair of vehicles with a limited set of sensor settings, set to your choosing.
- A reward structure.

Challenge / Rules:
- Each entry (team or individual) is allowed two unmanned marine vehicles to search the given region. A maximum time (declared just before mission launch) is allowed for search.
- Each vehicle has a top speed of 2.0 meters per /second.
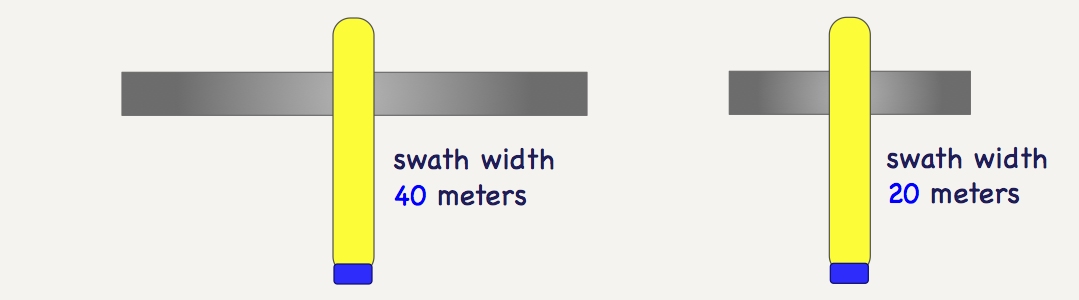
- Each vehicle is equipped with a hazard sensor which may be configured with one of four allowable swath widths. The larger the swath width, the poorer the sensor performance. The user may configure the detection threshold for their sensor to increase the probability of detection, but at the expense of increasing the probability of false alarm. The sensor is deactivated during vehicle turns. The swath width may not be changed after mission launch, but the detection threshold may be changed as often as desired.
- Limited communications is allowed between the two vehicles. (Bandwidth, frequency and range limited).
- The two vehicles must submit a single final report comprised of (a) a list of hazardous objects and locations, and (b) a transit swath through the search region.
- The penalties for false alarms and missed detections are applied only to this transit swath. However, additional penalties are applied if a transit swath is chosen with more hazards than the minimally hazardous transit swath.
Initial Provisions / Getting Started:
The starting provisions consist of (a) a baseline mission and (b) documentation including formal competition rules, general software documentation and tutorials for newcomers.
Baseline Mission:
A baseline mission will be distributed to participants, consisting of a small MOOS-IvP tree with example MOOS application modules and MOOS mission files for solving the hazard search problem. This tree is the form of a complete working, syntactically valid competition submission. The search and reporting algorithms however are naive and the vehicles do not coordinate at all. It will not fare well in competitions in its initial form. The purpose of this baseline mission is to reduce the threshold for getting started and to help clarify the format required for competition entries.
Documentation:
- Formal competition description and procedures for uploading submissions (Posted May 10th).
- Training labs will be posted, modeled after MIT 2.680 to, to provide a graduated sequence of exercises for new users of MOOS-IvP.
- General documentation for MOOS and MOOS-IvP is already available, at www.moos-ivp.org/docs.