MOOS-DAWG'15 Demo Day:
Battelle Marine Autonomy Bay at the MIT Sailing Pavilion
8:30am-11:30am July 23rd (second day of the workshop).
Food (Bertuccis) served at 11am.
The morning of Day 2 of the workshop we invite workshop attendees to the Battelle Autonomy Lab at the MIT Sailing Pavilion, about a 5 minute walk from the Stata Center where the main workshop talks are held.
There will be at least 5 groups providing informal demonstrations of their marine robotics technologies.
(:colstart:)
- The Datamaran Autonomous Sailboat PHOTOS
- The WAM-V USV PHOTOS
Now the Sea Grant Rex IV vehicle
Formally the MIT RobotX vehicle - The Bluefin Hovering AUV (HAUV)
- The New Bluefin SandShark UUV PHOTOS
- The Kingfisher M200 USVs
- The HoverGroup Autonomous Kayaks
(:column:)

(:colend:)
The Demo Day is presented in the "workshop spirit", where work ranging from in-progress to more advanced is encouraged. Expect the unexpected.
The Datamaran Autonomous Sailboat
 | The Datamaran is a new deep water instrumentation platform offering fully autonomous operation over mission durations measured in months. It is primarily wind propelled, and is power positive. It is the world's first self-righting catamaran. Unique deployment and payload configuration options set the Datamaran apart from other ASVs. PHOTOS |
The New Bluefin SandShark UUV
 | The Bluefin SandShark is a small, open-platform, autonomous underwater vehicle (AUV) designed for scientists and developers. SandShark combines a standardized low-cost tail with core vehicle systems, a large modular payload area, and an open development platform. This combination provides a flexible subsea "reference design" to support rapid technology development. SandShark is built on open source software and allows end users to modify or replace all aspects of the vehicle's software stack. Features like quick-connect fins for tool-less field replacement and modular body components make SandShark fast and easy to modify. SandShark's payload bay makes up over half the vehicle - it is the ideal test platform for small subsea sensors and autonomy scenarios. PHOTOS |
The Bluefin/MIT Hovering AUV (HAUV)
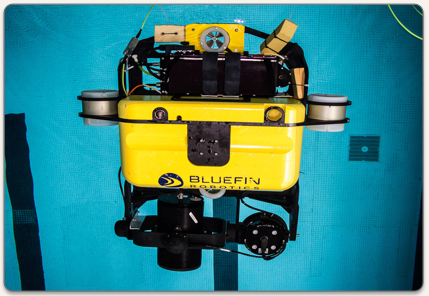 | The Bluefin Robotics Hovering AUV (HAUV) is a two-man-portable hovering AUV designed for ship hull inspection. Equipped with a high-resolution imaging sonar, it surveys ship's hulls and other structures with minimal prior knowledge. While surveys are executed autonomously, the operator can manually control the vehicle to further observe features of interest identified in the real-time data. HAUV can autonomously locate and relocate contacts on a ship's hull with a precision of better than 2 meters. The integrated DIDSON sonar provides high-resolution sonar images that can be viewed in real time over the vehicle's fiber optic tether. Data can also be post-processed into near-photo-quality images or mosaics using third-party software. HAUV uses thrusters to hover, rotate in place and translate in any direction, enabling operations in confined areas. A fiber optic tether allows remote manual control of the vehicle for added maneuverability. |
The Sea Grant Reef Explorer USV (formerly the MIT RobotX WAM-V USV)
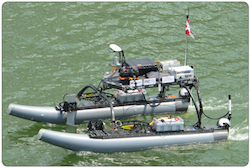 | The MIT WAM-V vessel was built for the 2014 International RobotX competition (robotx.mit.edu) with the students providing the systems for power, propulsion, navigation and software for sensor processing and autonomy. After the competition MIT Sea Grant took ownership of the vessel using many of the same components and software, but also augmented with winch-deployable sensors to be the next generation vessel in Sea Grant's Reef Explorer program. The vessel is now known as the Remote Explorer (REx IV). The Remote Explorer program will not only be a way to expand ocean science to the classroom, but also to provide a platform for real-time data collection for the greater scientific community. PHOTOS |
The Kingfisher M200 USV and Swappable Payload Autonomy Module
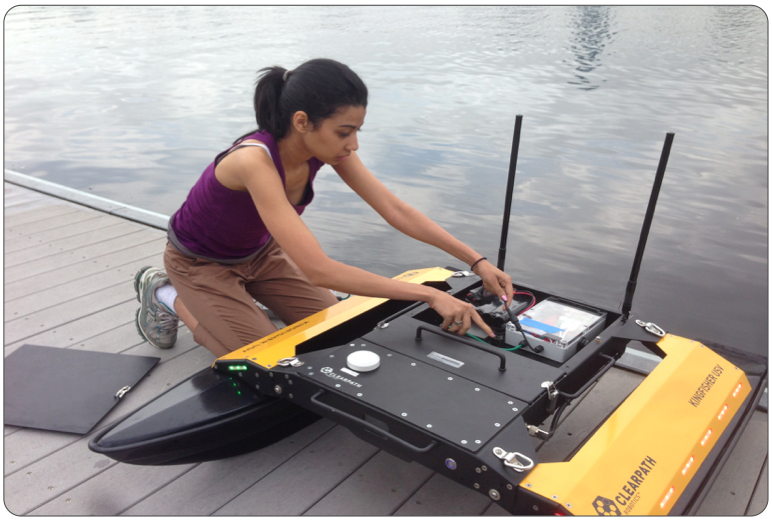 | The Clearpath Robotics Kingfisher M200 is the primary research and education vehicle used in the MIT course 2.680 Marine Autonomy Sensing and Communications. Several of these vehicles will be deployed during Demo Day to demonstrate their operation and connection to the shoreside command and control software. We will also demonstrate the stand-alone payload autonomy module running the autonomy system from within the M200 payload compartment via an interface from MOOS to the Clearpath front-seat ROS based system. |
The HoverGroup Autonomous Kayaks
 | The HoverGroup Autonomous Kayaks primarily serve as a testbed for multi-vehicle control using acoustic communication. Our experimental setup includes several kayaks, a portable networking base station and MicroModem, and a permanent shore setup at the MIT Sailing Pavilion. We also operate the Bluefin/MIT HAUV and a REMUS 100. The main payload of the kayaks is a WHOI MicroModem, towed a few meters deep. GPS and RF communication are available on the surface, allowing for easy navigation and real-time monitoring of experiments, while the towed modem enables experiments in the underwater acoustic environment. Other scientific sensors can be added; we have previously operated with temperature and turbidity sensors. |
| The kayak hull is the WaveSport Fuse 35, a kids whitewater kayak, 1.8m (5.9 ft) long. The small size of this kayak allows it to fit in the back of a SUV and be easily lifted in and out of the water by two people. The kayaks weigh roughly 40 kg (88 lbs). The whitewater hull design is less efficient for transit, but is highly maneuverable and seaworthy for its size. The modified kayak hull has one hole for the thruster shaft and two 80/20 rails running lengthwise in the front of the vehicle to provide a stiff mounting platform. Maximum speed when towing a modem is roughly 1.6 m/s (3 kts), and over 2 m/s (4 kts) is possible when not towing a modem. | |