Aquaticus Human Platform - The MOKAI
Maintained by: mikerb@mit.edu  Get PDF
Get PDF
1 MOKAI Overview
1.1 Mechanical Modifications to the MOKAI for Aquaticus
1.1.1 The Engine Covers
1.1.2 The MOKAI Windshield
1.1.3 Capping the Top Speed Limit by Reprogramming the Joystick
2 Instrumenting the MOKAI
2.1 The MOKAI Computer
2.2 Video/Audio Capture of the Player
2.3 Networking Hardware
2.4 Marine Radio Communications
1 MOKAI Overview
The MOKAI is a commercially available platform available to the public from a company in upstate New York dedicated to making this platform. At the outset of the Aquaticus project, MOKAI graciously donated a platform to MIT for initial tests. Currently there are five platforms with spares in the Aquaticus project. "MOKAI" is short for motorized kayak and is driven by a small gas engine.

Figure 1.1: The MOKAI is a commercial platform, typically used by fishermen and recreational boaters on lakes or rivers. This image and video is one of many found on line at YouTube or Vimeo. video:(1:22): https://vimeo.com/148966001
The boat is controlled by a single small joystick and uses waterjet propulsion. The lack of spinning propeller allows the boat to get into shallow water easily, but also makes it a safer platform for our experiments, and allows the boat to be easily place flat on a dock without having to worry about keeping a propeller off the ground.

1.1 Mechanical Modifications to the MOKAI for Aquaticus [top]
A number of mechanical modifications were made to the MOKAI to better suit our uses for the competition. We discuss these first, and later discuss further modifications to add instrumentation. The key mechanical modificications:
- A cover for the air intake openings on engine section
- A windshield
- Artificial capping of the top speed
1.1.1 The Engine Covers [top]
The MOKAI has been modified with covers over the air intake openings on the stern. Due to the high amount of maneuvering and sharp turns in Aquaticus, too much water was getting into the engine, causing stalling. This was essentially fixed with the covers during the summer of 2017. The summer of 2018 was a noticeably smooth year for MOKAI engine operation.
Figure 1.2: The MOKAI has been modified with covers over the air intake openings on the stern. video:(0:46): https://vimeo.com/222021219
1.1.2 The MOKAI Windshield [top]
Not surprisingly, the MOKAI does not come with a windshield. For normal recreational boating users this may make sense. For Aquaticus there is a substantial amount of instrumentation and electronic equipment on board, and operators quickly become wet, as in the below video.
Figure 1.3: Initially, without the MOKAI windshield, operators as shown in this video became quite wet in a short amount of time. video:(1:119): https://vimeo.com/178681034
The windshield was added in late 2017 and we haven't looked back. It has made a huge difference in our ability to safely instrument the boat. The windshield was purchases from "Painless Tom", one of several MOKAI hobbysts found on line. They look like this:

Figure 1.4: The MOKAI windshields.
1.1.3 Capping the Top Speed Limit by Reprogramming the Joystick [top]
The third major mechanical modification was actually made to the software configuration of the joystick, to limit the top thrust commanded to the boat. This was done for a few reasons. (1) The unmodified MOKAIs were much much faster than the robots, making the humans relatively super enabled, which is not particularly desirable for a human-robot collaboration. (2) The unmodified MOKAIs are very LOUD, which is not great for being good neighbors at the sailing pavilion, and for allowing voice-to-text to operate smoothly. (3) The faster MOKAIs can make some pretty aggressive turns, which aggrevated the problem of getting water into the engines and higher splashing around our electronic components.
2 Instrumenting the MOKAI
The MOKAI has an onboard computer and is on the same network as the robots. Part of this is (1) safety, so we can talk to the players, and the MOKAI position is known to the robots for collision avoidance, (2) data collection, so we can later analyze human decision making and activities, and (3) communication to the robots, to support on-board voice-to-text, and incoming text to voice from the robots.
2.1 The MOKAI Computer [top]
The MOKAI computer is a Raspberry PI computer in a water-tight box. This is the same computer and housing as used on the robot platforms. It is referred as the PABLO, or payload autonomy box. The PABLO is powered by an on-board battery stored in a separate water-tight box connected by water resistant cables.
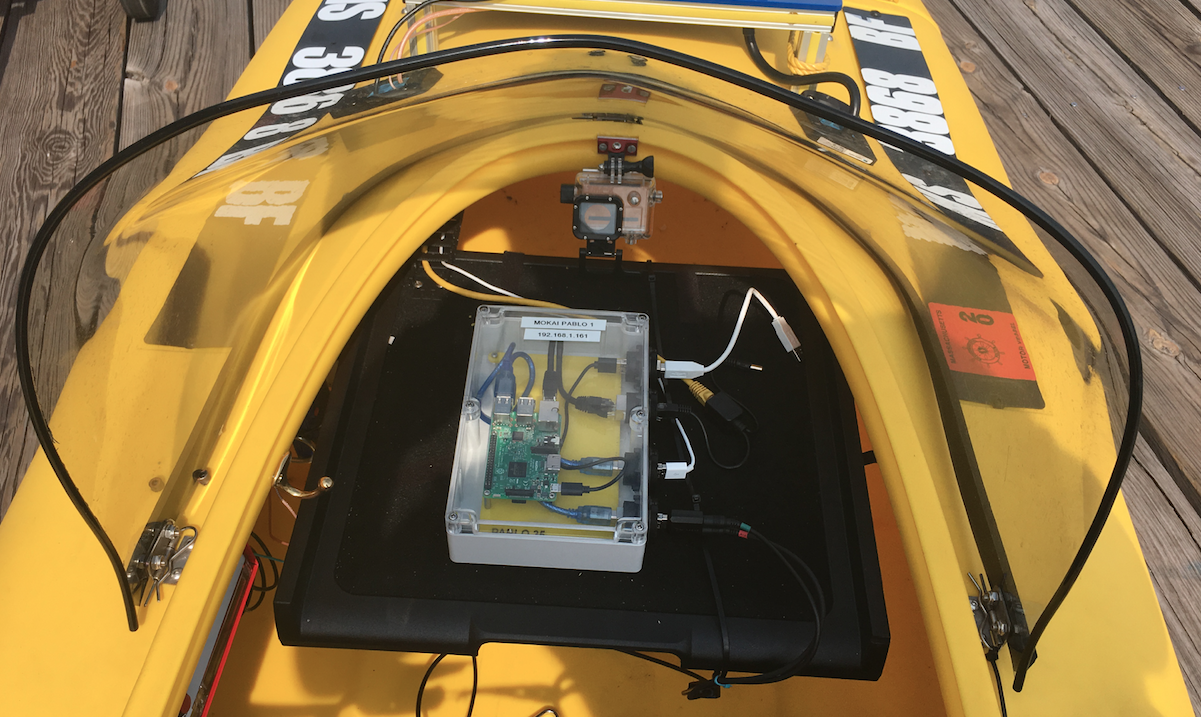
Figure 2.1: The MOKAI computer is a Raspberry PI in side water-tight box with external wet connectors for power, Ethernet and USB.
The PABLO computer is running MOOS, but not any of the IvP autonomy software. Modules include
- The MOOSDB
- The pShare app for connection to the shoreside computer
- The iGPS app for reading vehicle position, heading speed
- The uFldNodeBroker app for auto-connecting to the shoreside
- The iOS5000 app for reacing compass information
- The pNodeReporter app for building and sharing full node reports to the shoreside and to all robots
- The iZephyrHRM app for talking to the player heart-rate monitor
- The iMumbleClient app for sharing audio between players and the shoreside
- The iButtonBox app for interfacing with the button box (see below)
- The pLogger app for logging all data to a single log file
- The pRecord app for capturing raw audio files
- The uSpeechRec app for recording speech and performing speech-to-text
2.2 Video/Audio Capture of the Player [top]
A stand-alone GoPro camera is mounted on all MOKAIs, facing the player, to capture data about the player not otherwise available, such as the degree to which he/she is looking around the playing field, or at their own notes.

Figure 2.2: A GoPro camera is mounted in each MOKAI facing the player (left). Example video from a competition is shown on the right.
Currently (Aug18) the data is offloaded by person, in between each competition. Synchronizing to the other logged data is also done manually.
2.3 Networking Hardware [top]
All MOKAIs are on the local network, for sharing position information, and for sharing audio via Voice Over IP (VOIP). Each vehicle uses a Ubiquiti Networks Bullet 5 GHz High Power 802.11n Outdoor Radio System, mounted under the starboard side of the boat as shown in Figure 2.3. The radio is connected to an antenna mounted on the bow of the boat as shown. Power and data come from the Ethernet cable coming out of the PABLO box.
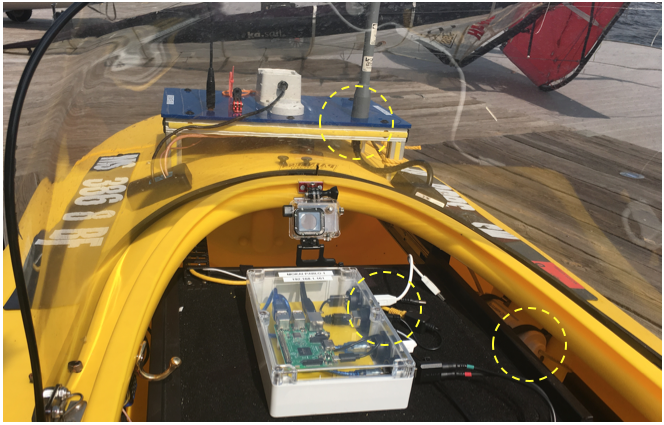
Figure 2.3: Each MOKAI is configured with a Bullet radio, connected to an antenna mounted on the bow, and connected via Ethernet cable to the onboard PABLO computer box. The radio is powered over Ethernet from the same battery poweringthe PABLO computer.
2.4 Marine Radio Communications [top]
Players in the MOKAI are equipped with a marine radio for communicating to the shoreside operators and nearby motorboat safety operator if they need. The marine radio is mounted in the boat on the port side, roughly at the operator knee level as shown in Figure 2.4 below. The radio is connected to an RF antenna mounted on the bow of the boat. A push-button is part of the cable from the radio to the operator headset. When the player wishes to talk, he/she pushes the button to talk.

Figure 2.4: Each MOKAI is configured with a marine radio mounted in the boat as shown on the left. One line goes to the operator headset. The other line goes to an RF antenna mounted on the bow.
The player wears a headset with a microphone as shown in the figure. The headset gear has two lines. One goes to the marine radio, and the other goes to the button box, discussed below, for VOIP communications.
Note: Communications to their teammate will happen over VOIP so it will be logged in the PABLO and shoreside operators can listen in, and the opposing team cannot evesdrop on their conversation. The marine radio is mounted in the boat on the port
Page built from LaTeX source using texwiki, developed at MIT. Errata to issues@moos-ivp.org. Get PDF