Autonomy
The research focus of LAMSS centers around the development of distributed ocean sensing concepts based on fully integrated Sensing, Modeling and Control, taking advantage of environmental and situational adaptation and collaboration within clusters of sensing nodes, without the need for direct operator control.
Nested Autonomy Paradigm
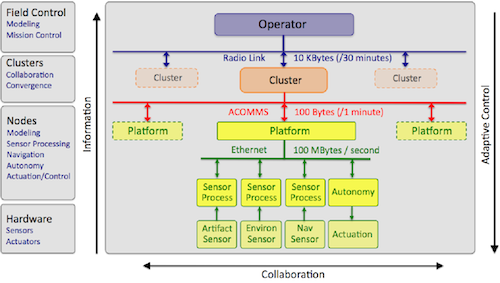
One of the principal autonomy developments of LAMSS is the Nested Autonomy concept, tailored to the inherent layering of the communication infrastructure, with the underwater network connectivity being provided by low-bandwidth acoustic communication (ACOMMS), and the above-surface networking being provided by high-bandwidth, but latent, radio frequency (RF) communication through a regularly surfacing gateway node. Onboard each node, the computer bus and ethernet networking provides very high bandwidth communication between the sensing, modeling and control processes.
The figure above shows this layered structure schematically. The vertical connectivity allows information to pass from sensors to the on-board processing and on to the control, or from each node to the field operator, and thus forms the basis for the autonomous 'adaptive control' which is a key to the capability compensating for the smaller sensor apertures of the distributed nodes. Similarly, the horizontal}connectivity forms the basis for collaboration between sensors on a node (sensor fusion) or between nodes (collaborative processing and control).
The three layers of horizontal communication have vastly different bandwidths, ranging from 100 byte/min for the inter-node ACOMMS to 100 Mbyte/sec for the on-board systems. Equally important, the layers of the vertical connectivity differ significantly in latency and intermittency, ranging from virtually instantaneous connectivity of the on-board sensors and control processes to latencies of 10-30 minutes for information flowing to and from the field control operators. This, in turn, has critical implication to the time scales of the adaptivity and collaborative sensing and control. Thus, adaptive control of the network assets with the operator in-the-loop is at best possible on hourly to daily basis, allowing the field operator to make tactical deployment decisions for the network assets based on e.g. environmental forecasts and reports of interfering shipping distributions, etc. Shorter time scale adaptation, such as autonomously reacting to episodic environmental events or a node tracking a marine mammal acoustically must clearly be performed without operator intervention. On the other hand, the operator can still play a role in cuing forward assets in the path of the dynamic phenomenon, using the limited communication capacity, taking advantage of his own operational experience and intuition. Therefore, just as well as a centralised control paradigm is infeasible for such systems, it is unlikely that a concept of operations based entirely on nodal autonomy be optimal.Instead, some combination will likely be optimal, but in view of the severe latency of the vertical}communication channels, the Nested Autonomy concept of operations is heavily tilted towards autonomy.
MOOS-IvP Payload Autonomy Architecture
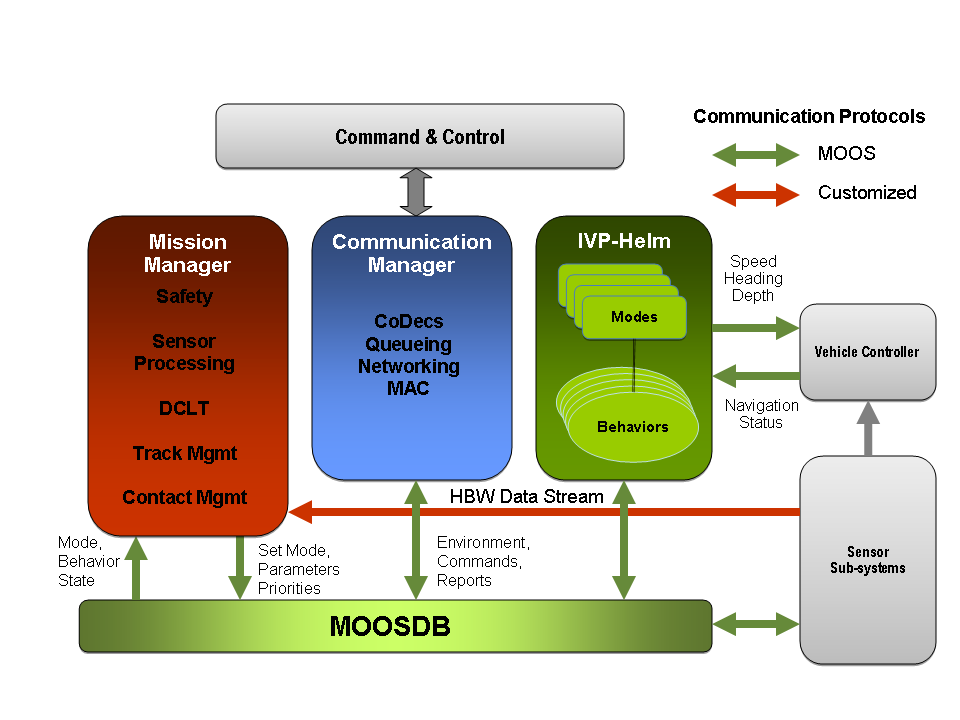
The layering of the autonomy is continued on the individual platforms, where the intelligent autonomy allowing adaptive and collaborative sensing is handled in the payload, with the IvP-Helm issuing low-level commands for desired speed, heading and depth to the main vehicle computer. This ''Payload Autonomy" architecture is one of the pioneering contributions of LAMSS.
All autonomous vehicles used for research in LAMSS are operated using the MOOS-IvP Payload Autonomy architecture, providing an extensive legacy software base, which allows the research effort to immidiately focus on the integration of the sensing, processing and modeling associated with the research objective at hand. In addition, the staff and students in the laboratory has developed a generic mission configuration infrastructure, which is used for all field deployments of the laboratory's UUVs and ASCs, with only a few mission-specific configuration parameters being changed between cruises, making it possible to support several field efforts each year, with a minimum of preparation required on the software side.
MOOS-IvP Simulation Environment
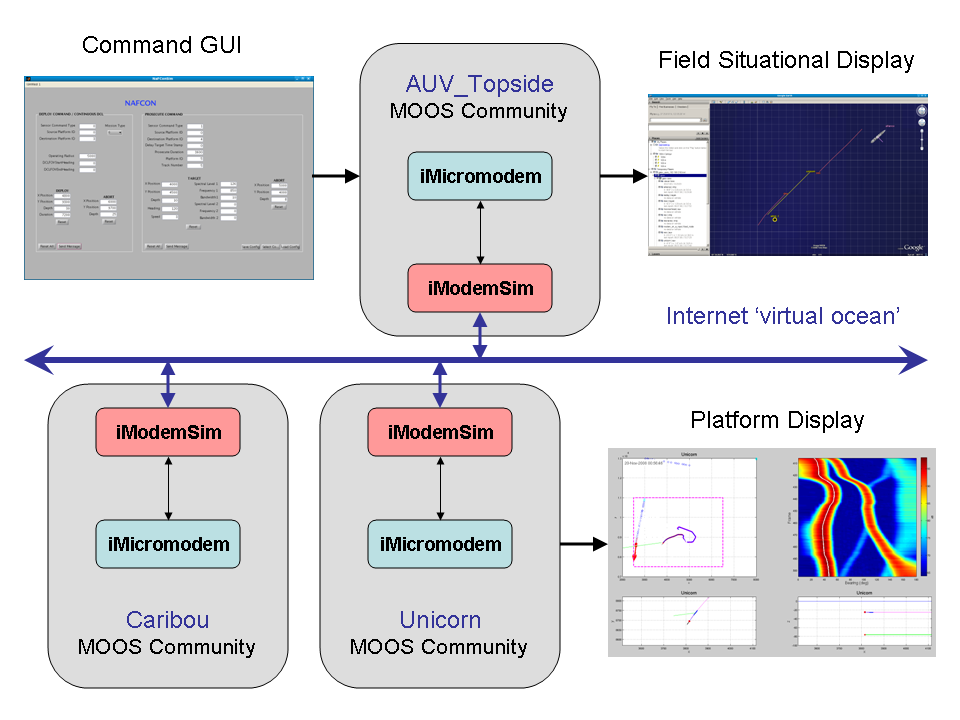
A core capability developed by the lab is a simulation environment which allow s for 'operating' an arbitrary number of virtual sensing nodes in a common virtual 'ocean'. A comprehensive suite of high-fidelity sensor simulators allows each virtual vehicle to operate an autonomy system configuration which is identical to the one use on a field deployed vehicle. Further, the simulator incorporates a modem network simulator, providing realistic simulation of the underwater acoustic communication environment, including range-dependent transmission errors and collisions. Another unique component of the LAMSS simulator is a suite of high-fidelity environmental acoustic simulators, allowing for generation of sensor level timeseries, incorporating environmental acoustic effects such as boundary interactions, refraction, noise and reverberation. The acoustic sensor models are closely tied to the platform and sensor dynamic simulators, including a model of the coupled dynamics of a UUV and a towed acoustic array.
Passive Sonar Simulator
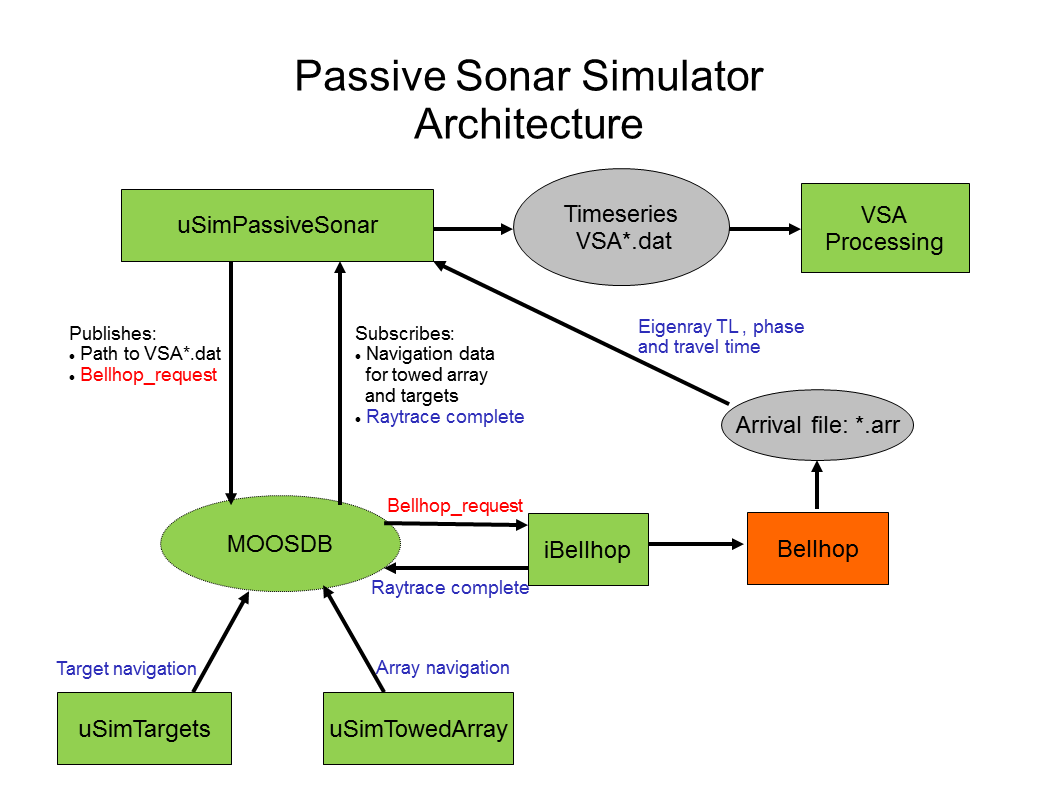
The MOOS-IvP passive sonar simulator has four core MOOS modules:
- The iBellhop process provides a generic interface to the legacy environmental acoustics raytracing code Bellhop for the MOOS-environment, both in the simulator and onboard the autonomous underwater vehicles. Any MOOS process or IvP behavior which needs an acoustic computation, issues a Bellhop Request, specifying source-receiver configuration, updated environmental information, frequency and source level definitions, and type of computation requested. Once Bellhop has completed the requested computation and generated the out files, iBellhop will publish the path to the result file, notifying the requesting process that the computation is completed and ready for processing.
- uSimTowedArray is a MOOS process simulating the towed array dynamics and continuously updating the associated navigation information for the acoustic receiver elements.
- uSimTargets is a process simulating an arbitrary number of mobile or static acoustic targets, the navigation information of which are continuously updated in the MOOSDB.
- uSimPassiveSonar is the principal acoustic simulator process, managing the incoming target and array navigation information and deciding when to request a new computation by Bellhop. For computational efficiency such requests are issued only when a local plane-wave expansion of the relevant eigenrays is deemed inaccurate. Thus, the process will request a computation of eigenrays in a rectangular ‘arrival box’ containing the current receiver array, and until the receiver exit this box the simulator will continuously generate element-level timeseries using the local plane-wave expansion of the eigenrays, and write them to a file which is completely compatible with the files generated by the actual onboard data acquisition system. The completion of a data file will signal all the signal processing modules that a new file is ready for processing. Once the array leaves the box a new request is made for Bellhop. For typical configurations a new Bellhop computation will only be needed every 10-20 seconds.
Recent extensions of the passive simulator include:
- Integration of the iBellhop/bellhop generic embedded acoustic arrival generator.
- Expansion of simulator to produce vector sensor timeseries.
- Modification of array simulator uSimTowedArray to support vertical array configurations during low-speed drift and station-keeping.
- Incorporation of realistic, depth-varying noise directionality characteristic of the deep ocean environment, e.g. allowing simulation of the effect of the horizontal noise notch below the critical depth.
Example
Simulation of an AUV executing a behavior seeking and maintaining a depth which is optimal for communicating with a communication buoy during a deep ocean survey mission. The behavior uses the embedded Bellhop code for predicting the depth-dependence of the transmission loss, which is then used by the IvP-Helm as a depth objective function which is combined with those produced by other mission beghaviors, such as those maintaining utility of the depth for the survey objective.
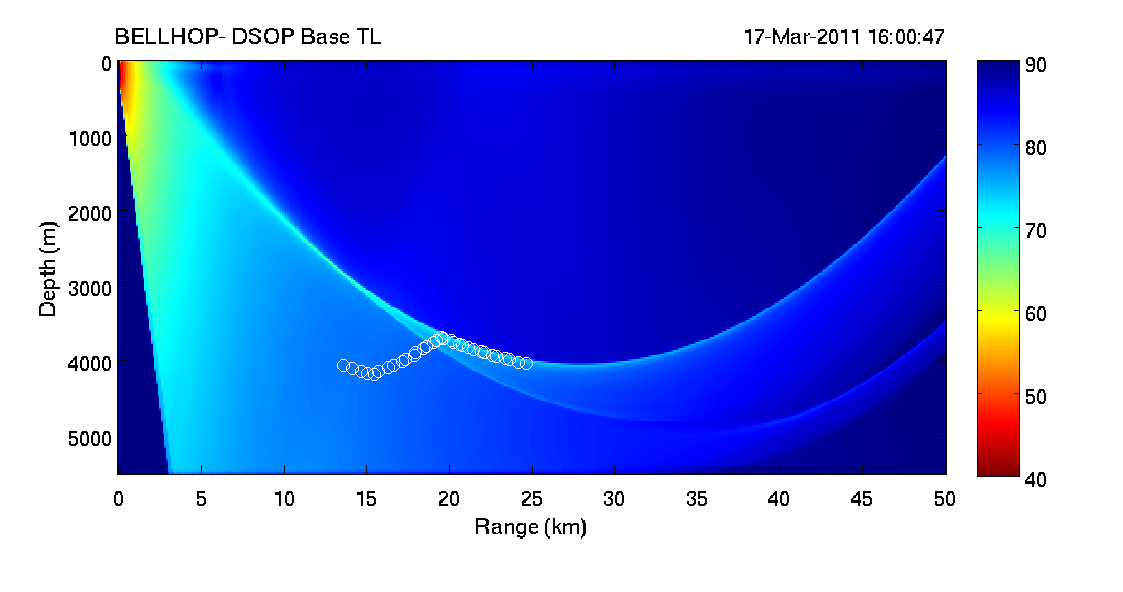
Multi-static Active Sonar Simulator
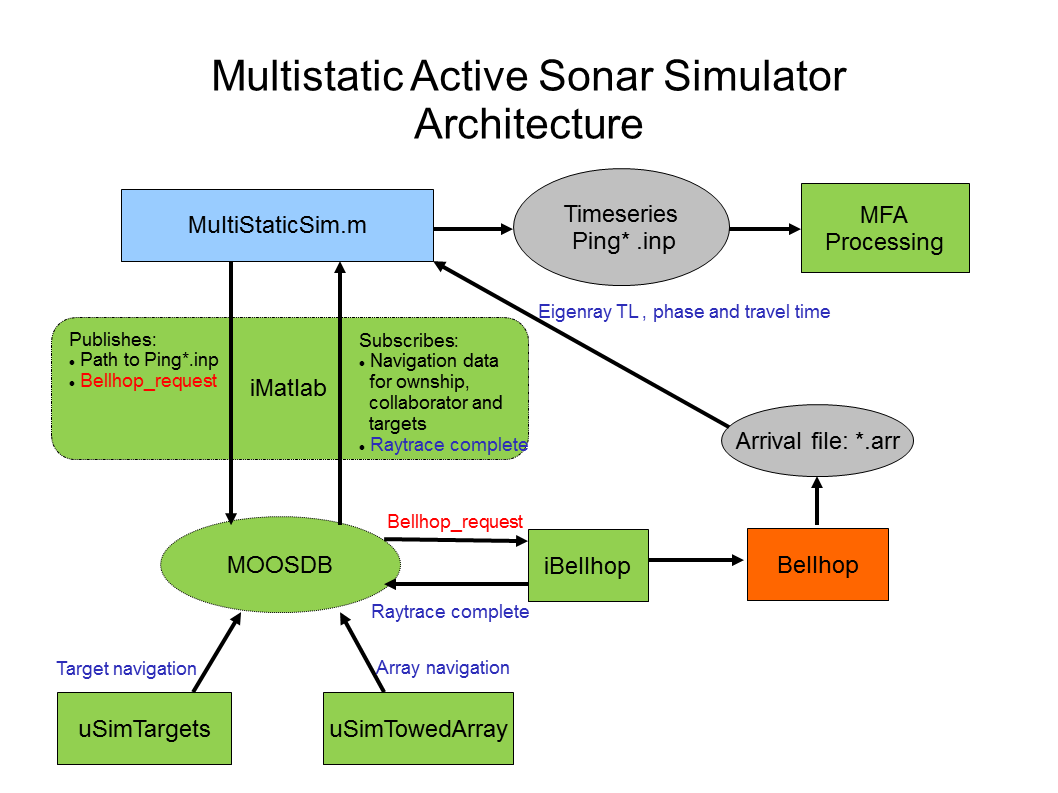
A high-fidelity multi-static sonar simulator developed for shallow water MCM scenarios with fixed targets, developed under the ONR SWAMSI program, has been expanded to support mid-frequency active MFA sonar concepts with moving targets and receivers in shallow as well as deep water, incorporating the effects of refraction, multiple boundary interactions and doppler effects. This new simulator supports the multistatic configurations explored in the GLINT joint research program with NURc, as well as deep ocean active sonar concepts such as those explored under the DSOP program.The architecture is very similar to the passive sonar simulator:
- iBellhop is the core process that consistently handles all requests environmental acoustic predictions, here executing the legacy raytracing code Bellhop for producing the multipath acoustic arrival structure associated with both the path from source to target, and from target to receiver array.
- Other MOOS-IvP modules shared with the passive simulator are uSimTargets, managing the dynamics of an arbitrary number of passive or active targets, and uSimTowedArray used for MFA platforms with towed arrays.
- multiStaticSim.m is a MATLAB process managing the multi-target, multi-static environmental acoustic simulation. It interfaces to the MOOSDB through the standard MOOS utility iMatlab. Based on navigation information for the simulated targets received from the MOOSDB, and the available source-receiver navigation information, it will issue requests to iBellhop for computing the arrival paths with associated travel times, launch- and arrival angles, and transmission loss, both between source and target and target and receivers. It will then apply a Doppler shift to all th arrival combinations, and compute the resulting timeseries and write them to a file, the path of which is published in the MOOSDB, alerting the MFA processing modules that a new ping file is available for processing.
recent upgrades to the active simulator include;
- Delayed file recording needed for large round-trip times associated with deep ocean environments.
- Integration of target manager module uSimTargets, to allow for mobile targets.
- High-fidelity Doppler modeling, including both temporal (frequency shift) and spatial (time delay) Doppler shifts associated with deeper ocean MFA scenarios.
The following additions are currently in progress:
- Computationally efficient simulation of realistic reverberation environments.
''Example"
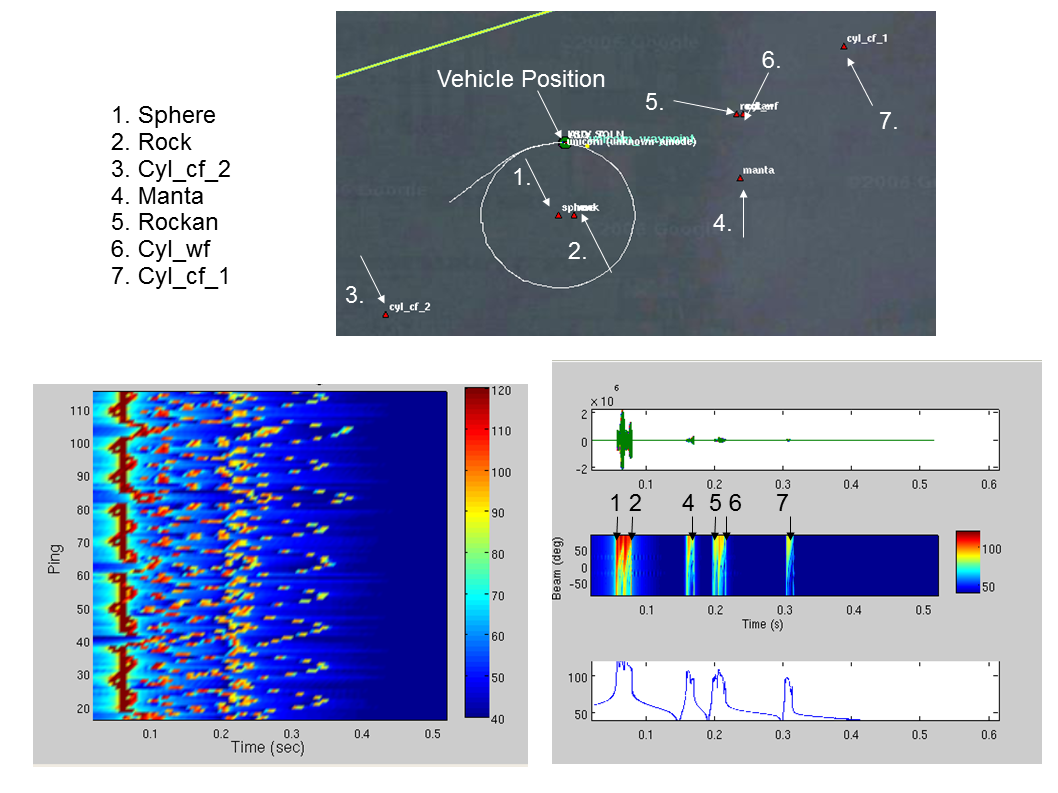
Simulation of AUV Unicorn with 16-element nose array and broad-band, low-frequency source, executing circular survey over target field deployed in la Spezia harbor during Swamsi11 experiment.