Prev-Talk | Next-Talk | All-Talks | Talks-Sorted | MOOS-DAWG'22
Talk-20: The Swarm Autonomy Toolbox, and MTASC Simulation Cluster
Michael Benjamin, MIT
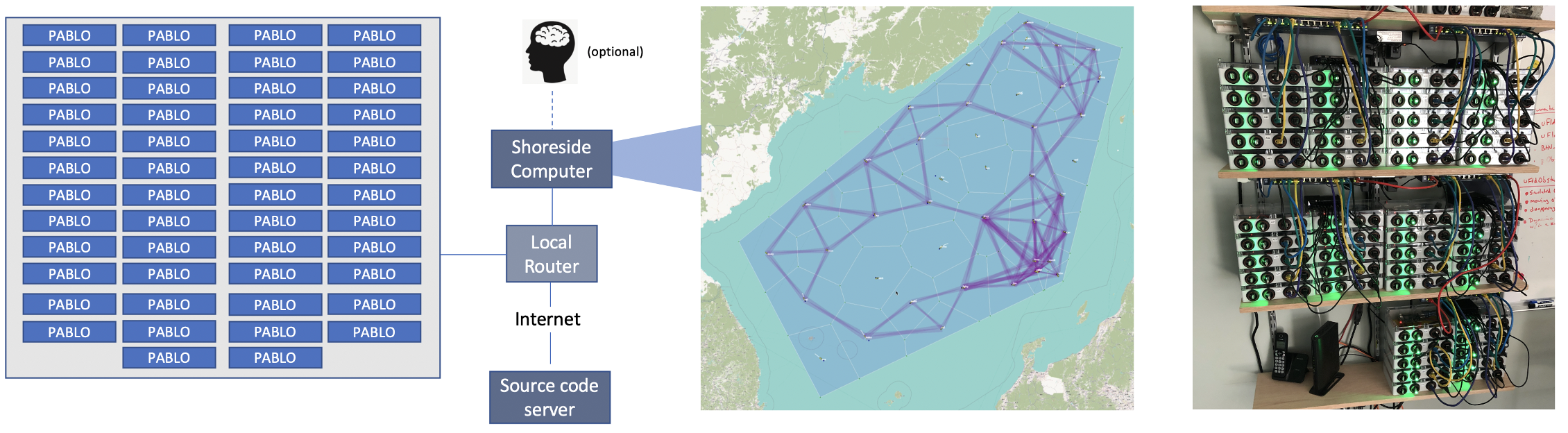
The Swarm Toolbox is a development extension of the MOOS-IvP public codebase containing a set of prototype libraries, MOOS applications and Helm behaviors with the focus on a set of multi-vehicle, i.e., swarm, missions, and methods for decentralized task allocation. The toolbox also contains several logistic utilities for managing and operating large numbers of vehicles including (a) automated distributed software version control, (b) mission launch and health status monitoring, and (c) post-mission automated collection of mission log files and archiving. The primary mission focus areas are (1) large area distributed mobile sensing, (2) swarm defense of a high-value asset, and (3) multi-vehicle linear convoying. The toolbox also contains a prototype variant of the conventional MOOS-IvP simulator for enabling simulation up to 400x real-time per vehicle. This project has high overlap with the MTASC project which emphasizes the hardware aspect of swarm simulations.
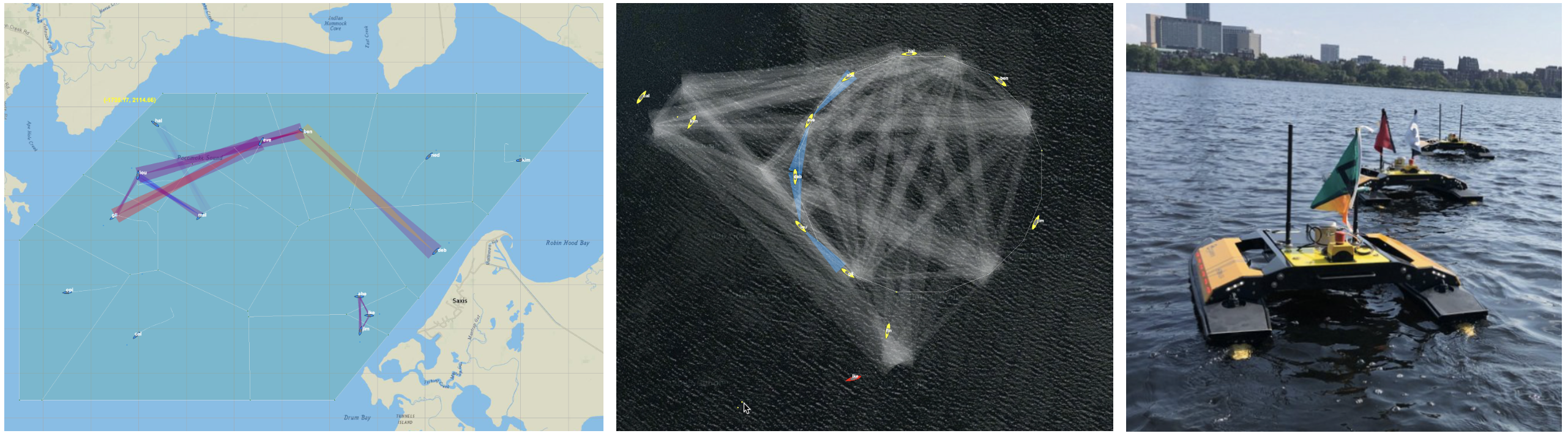
MTASC is a collection of physically co-located computers residing on a single local area network for simulating large sets of autonomous agents or vehicles. The choice of these computers, in this configuration was chosen for two reasons. (1) These systems are very close to operation of actual marine robots in a distributed multi-vehicle mission. Each node in the MTASC cluster can be directly dropped into any one of the MIT small autonomous surface craft as its autonomy computer. Operation in simulation of the MTASC cluster on a local network requires nearly all the same networking, version control, monitoring, and command-and-control tools required for operating physically deployed robots on the water. The MTASC not only enables us to simulate very large missions much faster than real time, but it also prepares our lab and students with the skills for managing large numbers of physical robots in the field. (2) The second reason is security. Although a similar multi-vehicle simulation could be accomplished using containers and procuring network computing services, by using the MTASC, all software remains on the SD cards of each node. Proprietary or classified work may be easily managed in an air-gapped version of the MTASC removed from the Internet.
Categories:
- Swarms
- MTASC
- Simulation