Prev-Talk | Next-Talk | All-Talks | Talks-Sorted | MOOS-DAWG'22
Talk-03: A Software Toolkit for Rapid Development of AUVs � Using MOOS-IvP with MITFrontseat, HydroMAN and VECTORS
Supun Randeni, Michael Benjamin and Michael S. Triantafyllou, MIT Department of Mechanical Engineering, MIT Sea Grant
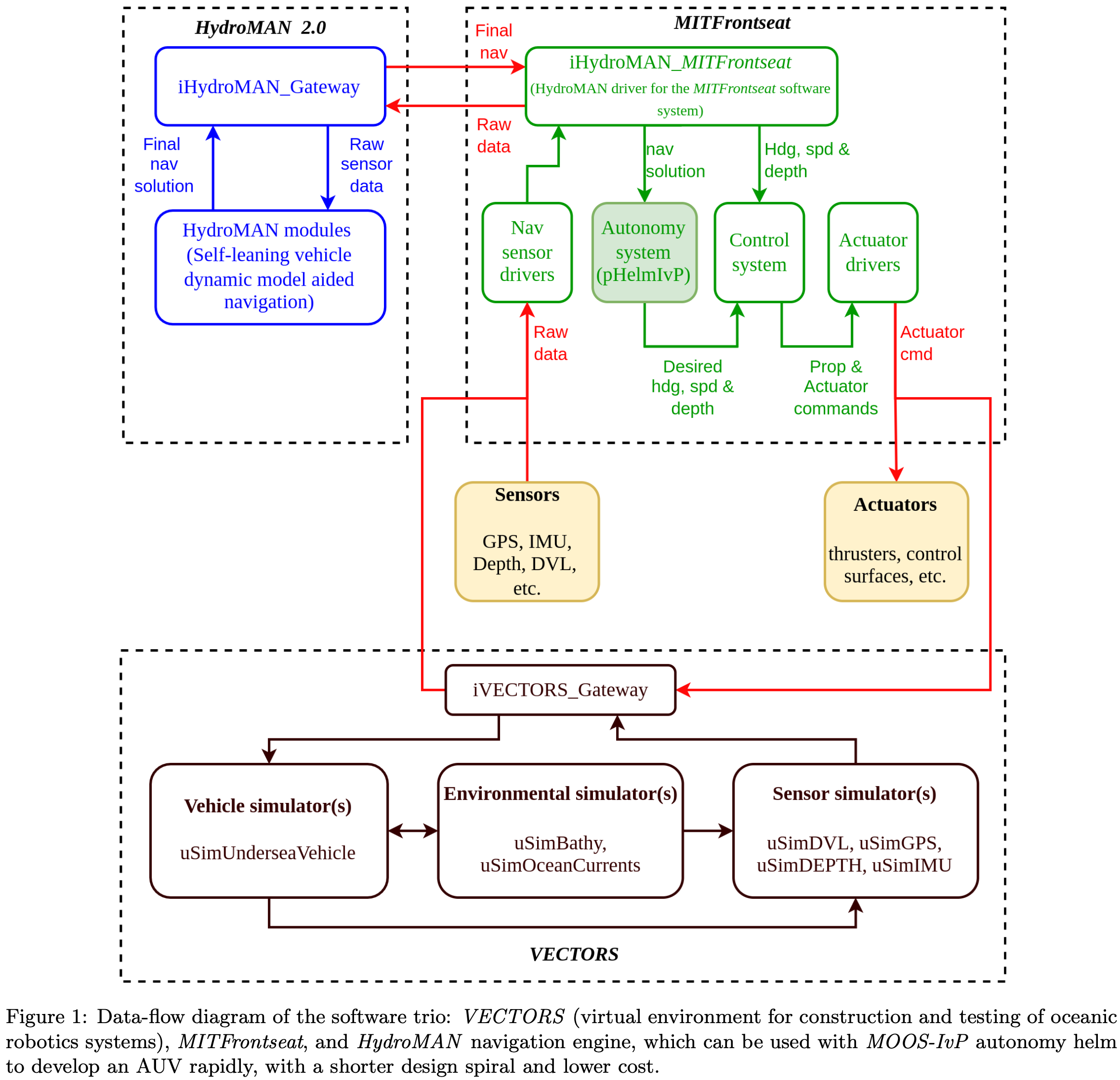
Developing a new class of AUVs is a complex process, which includes: (1) designing an optimized hullform, appendages and actuators (2) developing reliable embedded software for sensing, underwater navigation, autonomy, low-level control, and vehicle safety; and (3) developing required electronics. In this talk, we present a software trio; viz. VECTORS (i.e. a software/hardware-in-the-loop simulator for AUVs), MITFrontseat (i.e. an extendable vehicle frontseat software stack), and HydroMAN (i.e. a self-learning vehicle navigation engine), which can be used with MOOS-IvP autonomy helm to develop an AUV rapidly, with a shorter design spiral and lower cost.
MITFrontseat is a MOOS middleware based, extendable frontseat software stack. It includes MOOS drivers for sensing components such as IMUs, depth sensors, GPSs, etc. MITFrontseat is interfaced with HydroMAN navigation engine; sending available raw navigation sensor data (e.g. DVL, IMU, GPS, CVL, LBL/USBL) to HydroMAN and receiving the final navigation solution (HydroMAN is a self-leaning vehicle hydrodynamic model-aided navigation engine that communicates with client sys- tems, in this case MITFrontseat, using a �standard protocol� over TCP). The MOOS-IvP autonomy helm consumes the navigation solution and produces desired heading, desired speed and desired depth commands. MITFrontseat contains low-level control algorithms that consumes these desired values to compute appropriate actuator commands. The actuator MOOS drivers within MITFrontseat then pro- duces pulse-width modulation (PWM) and general-purpose input/output (GPIO) commands to servo motors and thrusters, accordingly.
A software-in-the-loop simulation environment is critical for the development and testing of AUV embedded software. The VECTORS, which stands for the virtual environment for construction and testing of oceanic robotics systems, includes a high-fidelity physics-based vehicle simulator that can be configured by the user for their conceptual vehicle design (e.g. customize the hullform shape, thruster configuration, control surface sizes and configuration, buoyancy, and other appendages such as sails, shrouds etc.). On startup, this MOOS application calculates the hydrodynamic coefficients for the configured vehicle using empirical formulae, and utilizes these coefficients to simulate the vehicle ground- truth dynamics. In addition, the VECTORS includes a stack of configurable environmental simulators (e.g. to simulate ocean currents, bathymetry, etc.) and sensor simulators (e.g. for GPS, IMU, DVL, depth, etc.). When the VECTORS is interfaced with MITFrontseat, the latter sends the actuator commands to the VECTORS, and receives raw sensor data produced by VECTORS according to the vehicle dynamics, environmental conditions, and accuracy of the sensor package. This enables simulating the entire software stack of the vehicle from the initial conceptual design stage, allowing the developers to make design decisions at early stages, significantly reducing the design and development cost.
Categories:
- HydroMAN
- MOOS-IvP
- AUVs
- MITFrontSeat
- VECTORS