PavLab Photos/Events
- Jervis Bay 2023
- Aug 23rd 2023
- Aug 3rd 2023
- Open House 2022
- Open House 2021
- MOOS-DAWG'22
- Aug/Sep 2021
- Photo Archives
Lab Marine Robots
Retired Robots




Current Projects
- MOOS-IvP
- Swarm Toolbox
- MTASC
- HydroLink Buoy
- MIT Sea Beaver UUV
- Autonomous Fish Finding
- Advanced COLREGS
- HydroMAN
Prior Projects
- PBACS
- Prodromos
- RoboWhaler
- Sea Train
- Multi-Arch Autonomy
- Morpheus
- Perseus
- IITCHS
- Remote Explorer IV
- Aquaticus
- Charting the Charles
- Boston Harbor RoboChallenge
- COLREGS Autonomy
- ICEX 2016/2020
PavLab Training/Protocol
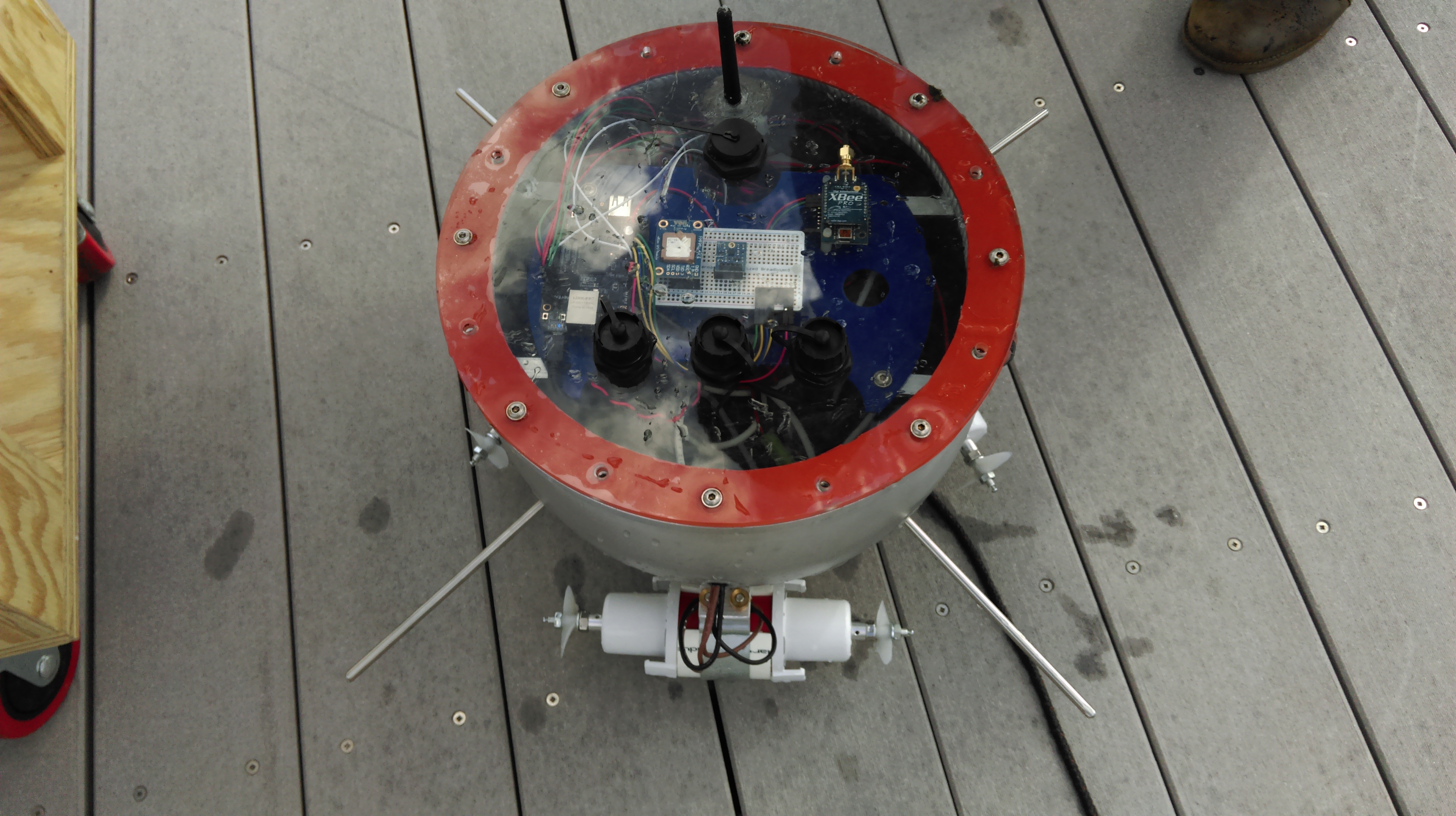
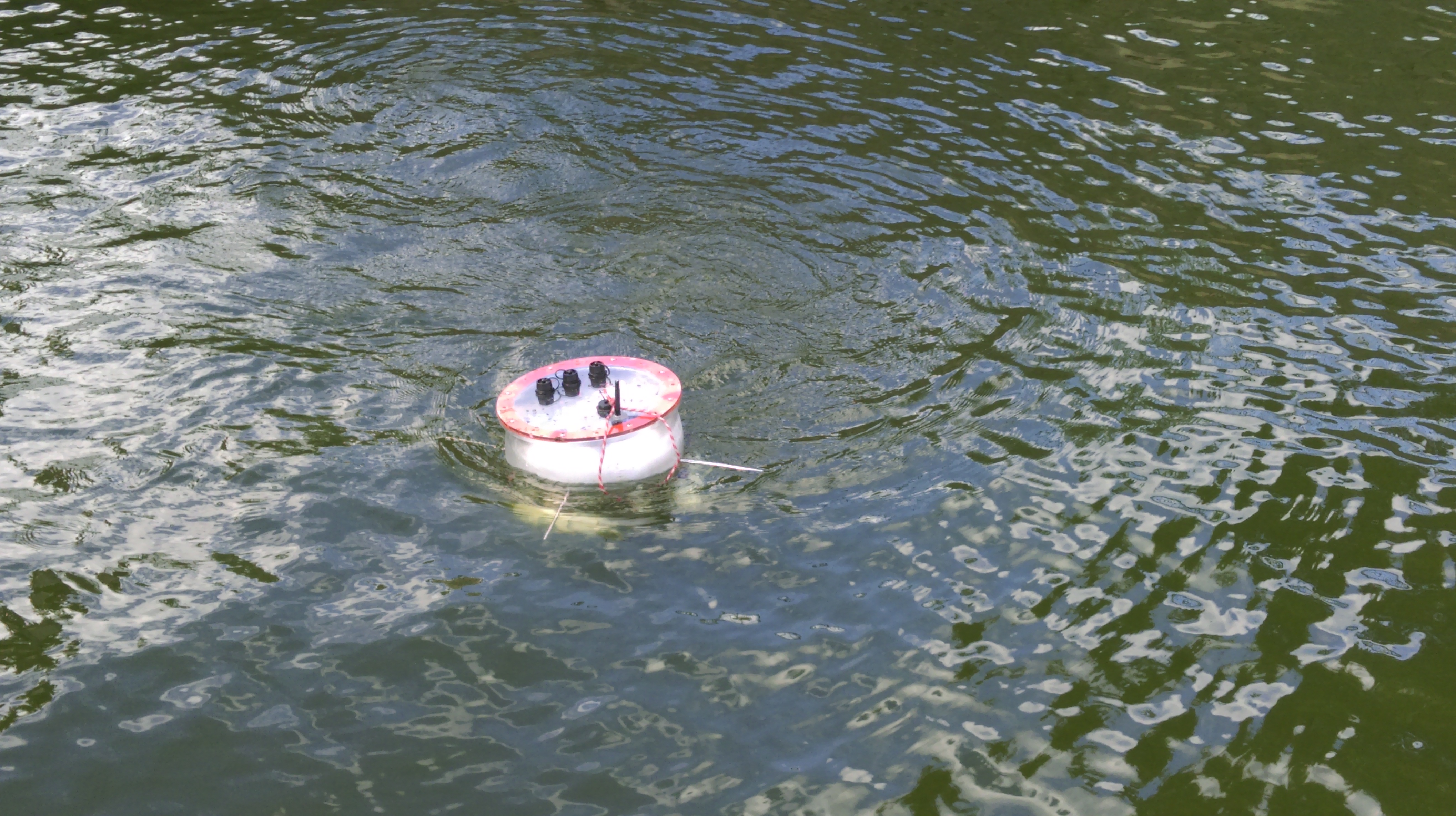
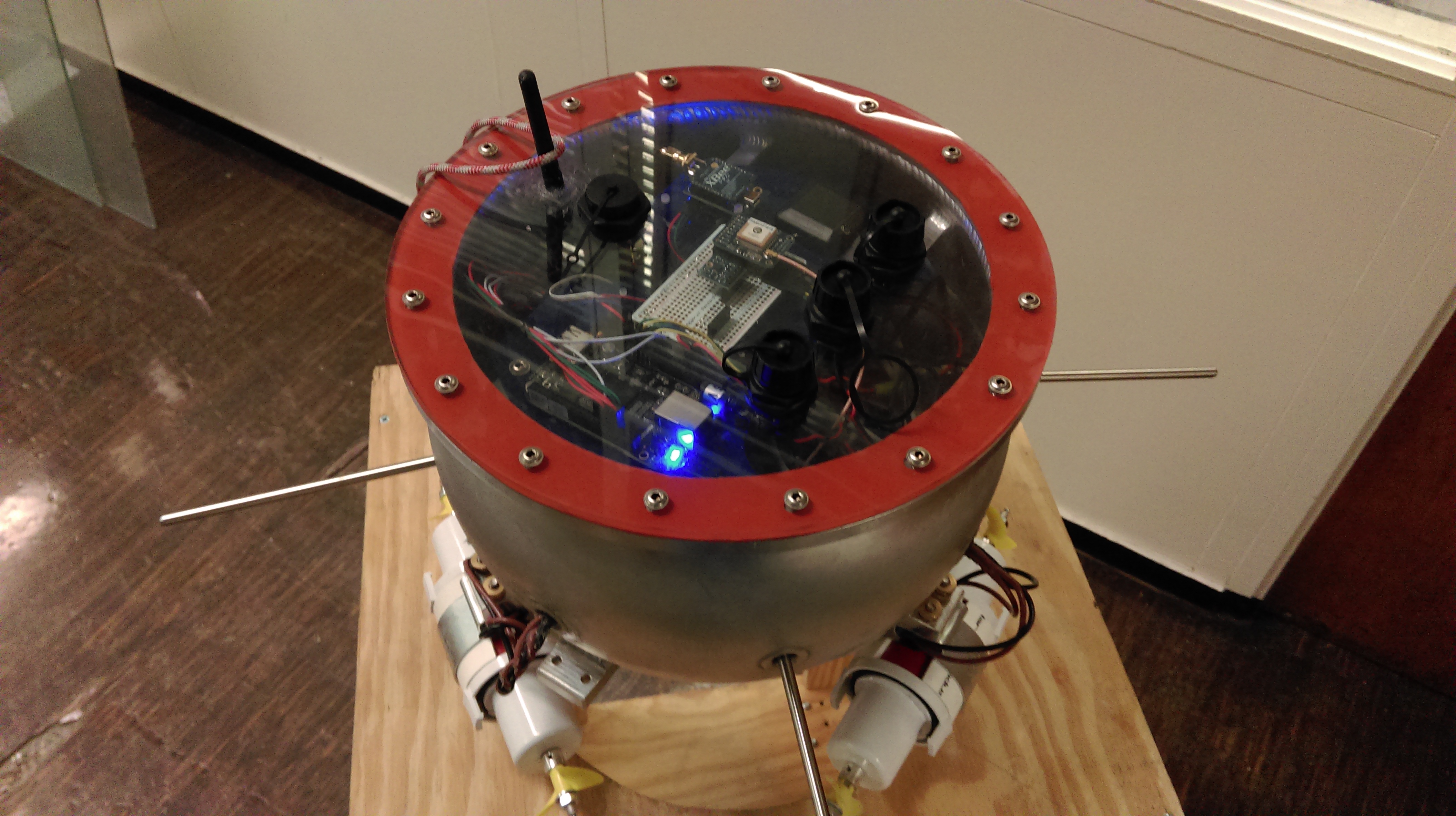
The B.o.B. Buoy
Our main focus is a universally stable vehicle capable of following simple coordinate based directions for self-positioning. Once successful, the design will be replicated in order to perform as a network of self-assembling buoys connected via a homogeneous mesh network.
Each buoy will make independent decisions based on the globally and locally available data in order to more rapidly advance the environmental picture wherein the buoys navigate and investigate. These are the first steps to a Distributed-Computational Fluid Dynamics (D-CFD) environment, in which computations are heterogeneously spread across the network, reducing the overall computational demands on any given node, while simultaneously developing global understanding.
Student POC:
- Brandon Zoss (bzoss@mit.edu)
- Grgur Tokic